4 实验:传感器的应用 知识点题库

 =(用△S,△t表示),这个速度可以近似认为就是通过光电门的瞬时速度,若遮光条宽度△S=3cm,滑块通过第一个光电门的时间为△t1=0.15s,通过第二个光电门的时间为△t2=0.1s,则滑块经过第一个光电门时的瞬时速度为V1=m/s,滑块经过第二个光电门时的瞬时速度为V2=m/s.
=(用△S,△t表示),这个速度可以近似认为就是通过光电门的瞬时速度,若遮光条宽度△S=3cm,滑块通过第一个光电门的时间为△t1=0.15s,通过第二个光电门的时间为△t2=0.1s,则滑块经过第一个光电门时的瞬时速度为V1=m/s,滑块经过第二个光电门时的瞬时速度为V2=m/s.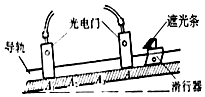
某研究性学习小组用图1所示装置来测定当地重力加速度,主要操作如下:
①安装实验器材,调节试管夹(小铁球)、光电门和纸杯在同一竖直线上;
②打开试管夹,由静止释放小铁球,用光电计时器记录小铁球在两个光电门间的运动时间t,并用刻度尺(图上未画出)测量出两个光电门之间的高度h,计算出小铁球通过两光电门间的平均速度v;
③保持光电门1的位置不变,改变光电门2的位置,重复②的操作,测出多组(h,t),计算出对应的平均速度”;
④画出v﹣t图像.

请根据实验,回答如下问题:
-
(1) 设小铁球到达光电门l时的速度为v0 , 当地的重力加速度为g.则小铁球通过两光电门间平均速度v的表达式为.(用v0、g和t表示)
-
(2) 实验测得的数据如表:
实验次数
1
2
3
4
5
6
h(cm)
10.00
20.00
30.00
40.00
50.00
60.00
t(s)
0.069
0.119
0.159
0.195
0.226
0.255
v(m/s)
1.45
1.68
1.89
2.05
2.21
2.35
请在图2坐标纸上画出v﹣t图像.
-
(3) 根据v﹣t图像,可以求得当地重力加速度g=m/s2 , 小球通过光电门1时的速度为 m/s.(以上结果均保留两位有效数字)
某实验小组探究合外力做功和动能变化的关系,他们将宽度一定的挡光片固定在小车上,用不可伸长的细线将其通过一个定滑轮与砝码盘相连,在水平桌面上的A、B两点各安装一个光电门,记录小车通过A、B位置时的遮光时间,小车中可以放置砝码.

-
(1) 实验主要步骤如下:
①实验前应将木板左端略微抬高,使小车通过两光电门的遮光时间相等,这样做的目的是;
②用长度测量工具游标卡尺测量挡光片宽度为d,再用刻度尺量得A、B之间的距离为L;
③将小车停在C点,在砝码盘中放上砝码,小车在细线拉动下运动,记录此时小车(含挡光片及车中砝码)的质量为M,砝码盘和盘中砝码的总质量为m,小车通过A、B的遮光时间分别为t1、t2 , 已知重力加速度为g,则可以得到A至B过程中小车的合外力做功为,小车的动能变化量为(用相应的字母m、M、t1、t2、L、d表示);
④在小车中增减砝码或在砝码盘中增减砝码,重复③的操作.
-
(2) 为了实验能达到预期效果,步骤③中M、m应满足的条件是.
如图甲所示,在水平放置的气垫导轨上有一带有方盒的滑块,质量为M,气垫导轨右端固定一定滑轮,细线绕过滑轮,一端与滑块相连,另一端挂有6个钩码,设每个钩码的质量为m,且M=4m.

-
(1)
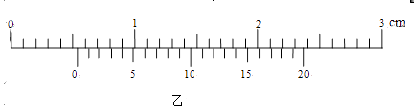
用游标卡尺测出滑块上的挡光片的宽度,读数如图乙所示,则宽度d=cm;
-
(2) 某同学打开气源,将滑块由静止释放,滑块上的挡光片通过光电门的时间为t,则滑块通过光电门的速度为(用题中所给字母表示);
-
(3) 开始实验时,细线另一端挂有6个钩码,由静止释放后细线上的拉力为F1 , 接着每次实验时将1个钩码移放到滑块上的方盒中,当只剩3个钩码时细线上的拉力为F2 , 则F12F2(填“大于”、“等于”或“小于”);
-
(4) 若每次移动钩码后都从同一位置释放滑块,设挡光片距光电门的距离为L,钩码的个数为n,测出每次挡光片通过光电门的时间为t,测出多组数据,并绘出 n﹣
 图象,已知图线斜率为k,则当地重力加速度为(用题中字母表示).
图象,已知图线斜率为k,则当地重力加速度为(用题中字母表示).
温度传感器是一种将温度变化转换为电学量变化的装置,它通过测量传感器元件的电学量随温度的变化来实现温度的测量,其核心部件是由半导体材料制成的热敏电阻.在某次实验中,为了测量热敏电阻RT在0℃到100℃之间多个温度下的阻值,一实验小组设计了如图甲所示电路.
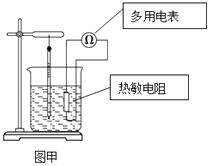
其实验步骤如下:
①正确连接电路,在保温容器中加入适量开水;
②加入适量的冰水,待温度稳定后,测量不同温度下热敏电阻的阻值;
③重复第②步操作若干次,测得多组数据.
-
(1)
该小组用多用电表“×100”挡测热敏电阻在100℃下的阻值,发现表头指针偏转的角度很大;为了准确地进行测量,应换到挡(选填“×10”、“×1k”);如果换挡后就用表笔连接热敏电阻进行读数,那么欠缺的实验步骤是:,补上该步骤后,表盘的示数如图乙所示,则它的电阻是Ω.
实验小组算得该热敏电阻在不同温度下的阻值,并据此绘得图丙的R﹣t关系图线,请根据图线写出该热敏电阻的R﹣t关系;


-
(2)
若把该热敏电阻与电源(电动势E=1.5V、内阻不计)、电流表(量程为5mA、内阻Rg=100Ω)、电阻箱R0串联起来,连成如图丁所示的电路,用该电阻作测温探头,把电流表的电流刻度改为相应的温度刻度,就得到了一个简单的“热敏电阻测温计”.
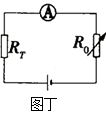
①电流表刻度较大处对应的温度刻度应该(填“较大”或“较小”);
②若电阻箱的阻值取R0=220Ω,则电流表3mA处所对应的温度刻度为℃.
 ,②W∝v,③W∝v2 . 他们的实验装置如图甲所示,PQ为一块倾斜放置的木板,在Q处固定一个速度传感器(用来测量物体每次通过Q点时的速度),每次实验,物体从不同初始位置处由静止释放.
,②W∝v,③W∝v2 . 他们的实验装置如图甲所示,PQ为一块倾斜放置的木板,在Q处固定一个速度传感器(用来测量物体每次通过Q点时的速度),每次实验,物体从不同初始位置处由静止释放.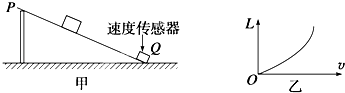
同学们设计了以下表格来记录实验数据.其中L1、L2、L3、L4…代表物体分别从不同初始位置处无初速释放时初始位置到速度传感器的距离,v1、v2、v3、v4…表示物体每次通过Q点的速度.
实验次数 | 1 | 2 | 3 | 4 | … |
L | L1 | L1 | L3 | L4 | … |
v | v1 | v2 | v3 | v4 | … |
他们根据实验数据绘制了如图乙所示的L﹣v图象,并得出结论W∝v2 .
-
(1) 你认为他们的做法是否合适?
-
(2) 你有什么好的建议?
-
(3) 在此实验中,木板与物体间摩擦力的大小(填“会”或“不会”)影响探究出的结果.
-
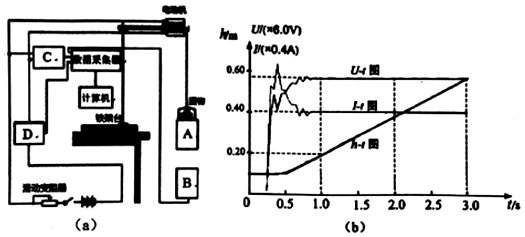
(1) 图(a)中,装置C是传感器,D是传感器。(请填写传感器名称)
-
(2) 如图(a)所示,闭合电键前,滑动变阻器滑片应处于。
-
(3) 根据(b)图中的U﹣t、I﹣t和h﹣t图象,选择区域读取数据,为较精确地算出电动机的效率,则对应的时间段选取较适宜的是
(A)0~0.5s(B)0~10s(C)1.0~20s(D)1.0~30s
-
(4) 读出所选过程中C、D的示数,已知重物和A的总质量为m=70g,重力加速度g=9.80m/s2 , 可算得该直流电动机的效率η=%。
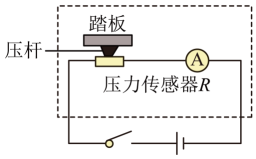
| 压力F/N | 0 | 250 | 500 | 750 | 1000 | 1250 | 1500 | …… |
| 电阻R/Ω | 300 | 270 | 240 | 210 | 180 | 150 | 120 | …… |
请回答:
-
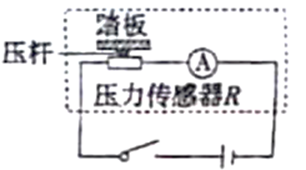
(1) 该秤零起点(即踏板空载时)的刻度线应标在电流表刻度盘A处。
-
(2) 如果某人站在该秤踏板上,电流表刻度盘的示数为20mA,这个人的体重是kg。

-
(1) 利用图甲所示的电路测量该传感器在不同压力下的阻值RN , 其阻值约几十千欧,实验室提供以下器材:
电源电动势为6V;
电流表A(量程250μA,内阻约为50Ω);
电压表V(量程3V,内阻约为20kΩ);
滑动变阻器R(阻值0~100Ω);
为了提高测量的准确性,应该选下面哪个电路图进行测量______;
A .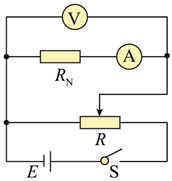 B .
B . 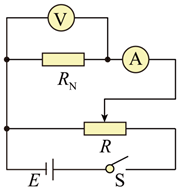 C .
C . 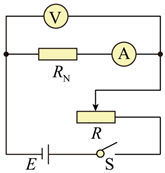
-
(2) 通过多次实验测得其阻值RN随压力F变化的关系图像如图乙所示:
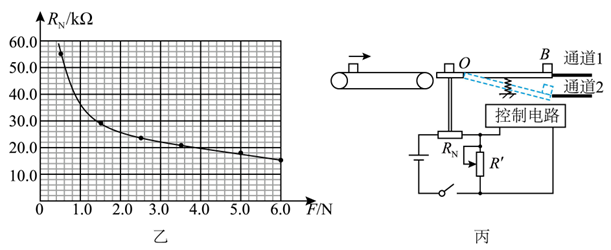
由图乙可知,压力越大,阻值(选填“越大”或“越小”),且压力小于2.0N时的灵敏度比压力大于2.0N时的灵敏度(灵敏度指电阻值随压力的变化率)(选填“高”或“低”);
-
(3) 利用该压力传感器设计了如图丙所示的自动分拣装置,可以将质量不同的物体进行分拣,图中RN为压力传感器,
 为滑动变阻器,电源电压为6V(内阻不计)。分拣时将质量大小不同的物体用传送带运送到托盘上,OB为一个可绕O转动的杠杆,下端有弹簧,控制电路两端电压≤3V时,杠杆OB水平,物体水平通过进入通道1,当控制电路两端电压>3V时,杠杆的B端就会被吸下,物体下滑进入通道2,从而实现分拣功能。取重力加速度g=10m/s2 , 若要将质量大于0.16kg的货物实现分拣,应该将 调成kΩ(结果保留3位有效数字)。
为滑动变阻器,电源电压为6V(内阻不计)。分拣时将质量大小不同的物体用传送带运送到托盘上,OB为一个可绕O转动的杠杆,下端有弹簧,控制电路两端电压≤3V时,杠杆OB水平,物体水平通过进入通道1,当控制电路两端电压>3V时,杠杆的B端就会被吸下,物体下滑进入通道2,从而实现分拣功能。取重力加速度g=10m/s2 , 若要将质量大于0.16kg的货物实现分拣,应该将 调成kΩ(结果保留3位有效数字)。


-
(1) 实验前,应将滑动变阻器R的滑片移至(填“a”或“b”)端。
-
(2) 本实验测得的热敏电阻的电阻值(填“大于”、“等于”或“小于”)真实值:待测热敏电阻为(填“正温度系数”或“负温度系数”)热敏电阻。
-
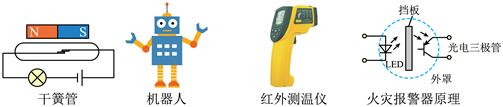
(3) 将该热敏电阻用于如图丙所示的火灾报警器电路中,报警器接在A、B两点之间。已知R1=3kΩ,R2=4kΩ,R3=6kΩ,当A点的电势高于B点的电势时报警器开始报警,若出现火灾,则当热敏电阻的温度为℃时报警器开始报警。(结果保留两位有效数字)

|
压力F/N |
0 |
250 |
500 |
750 |
1 000 |
1 250 |
1 500 |
… |
|
电阻R/Ω |
300 |
270 |
240 |
210 |
180 |
150 |
120 |
… |
-
(1) 该秤零点(即踏板空载时)的刻度线应标在电流表刻度盘A处;
-
(2) 如果某人站在该秤踏板上,电流表刻度盘的示数为20mA,这个人的质量是kg。



