5.4 信息时代离不开传感器 知识点题库
-
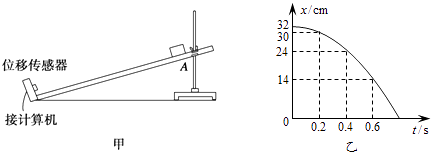
(1) 根据上述图线,计算0.4s时木块的速度v=m/s,木块加速度a=m/s2;(结果均保留2位有效数字)
-
(2) 为了测定动摩擦因数μ,还需要测量的量是;(已知当地的重力加速度g)

 =(用△S,△t表示),这个速度可以近似认为就是通过光电门的瞬时速度,若遮光条宽度△S=3cm,滑块通过第一个光电门的时间为△t1=0.15s,通过第二个光电门的时间为△t2=0.1s,则滑块经过第一个光电门时的瞬时速度为V1=m/s,滑块经过第二个光电门时的瞬时速度为V2=m/s.
=(用△S,△t表示),这个速度可以近似认为就是通过光电门的瞬时速度,若遮光条宽度△S=3cm,滑块通过第一个光电门的时间为△t1=0.15s,通过第二个光电门的时间为△t2=0.1s,则滑块经过第一个光电门时的瞬时速度为V1=m/s,滑块经过第二个光电门时的瞬时速度为V2=m/s.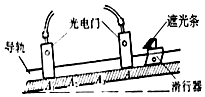
某实验小组探究合外力做功和动能变化的关系,他们将宽度一定的挡光片固定在小车上,用不可伸长的细线将其通过一个定滑轮与砝码盘相连,在水平桌面上的A、B两点各安装一个光电门,记录小车通过A、B位置时的遮光时间,小车中可以放置砝码.

-
(1) 实验主要步骤如下:
①实验前应将木板左端略微抬高,使小车通过两光电门的遮光时间相等,这样做的目的是;
②用长度测量工具游标卡尺测量挡光片宽度为d,再用刻度尺量得A、B之间的距离为L;
③将小车停在C点,在砝码盘中放上砝码,小车在细线拉动下运动,记录此时小车(含挡光片及车中砝码)的质量为M,砝码盘和盘中砝码的总质量为m,小车通过A、B的遮光时间分别为t1、t2 , 已知重力加速度为g,则可以得到A至B过程中小车的合外力做功为,小车的动能变化量为(用相应的字母m、M、t1、t2、L、d表示);
④在小车中增减砝码或在砝码盘中增减砝码,重复③的操作.
-
(2) 为了实验能达到预期效果,步骤③中M、m应满足的条件是.
图1为测量物块与水平桌面之间动摩擦因数的实验装置示意图.实验步骤如下:
①用天平测量物块和遮光片的总质量M、重物的质量m;用游标卡尺测量遮光片的宽度d;用米尺测量两光电门之间的距离s;
②调整轻滑轮,使细线水平;
③让物块从光电门A的左侧由静止释放,用数字毫秒计分别测出遮光片经过光电门A和光电门B所用的时间△tA和△tB , 求出加速度a;
④多次重复步骤③,求a的平均值  ;
;
⑤根据上述实验数据求出动摩擦因数μ.
回答下列问题:
-
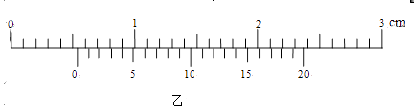
(1) 用20分度的游标卡尺测量d时的示数如图2所示,其读数为 cm;
-
(2) 物块的加速度a可用d、s、△tA和△tB表示为a=;
-
(3) 动摩擦因数μ可用M、m、 和重力加速度g表示为μ=;
-
(4) 如果滑轮略向下倾斜,使细线细线没有完全调节水平,由此测得的μ(填“偏大”或“偏小”);这一误差属于(填“偶然误差”或“系统误差”).
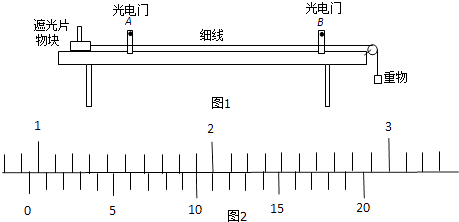
如图甲所示,在水平放置的气垫导轨上有一带有方盒的滑块,质量为M,气垫导轨右端固定一定滑轮,细线绕过滑轮,一端与滑块相连,另一端挂有6个钩码,设每个钩码的质量为m,且M=4m.

-
(1)
用游标卡尺测出滑块上的挡光片的宽度,读数如图乙所示,则宽度d=cm;
-
(2) 某同学打开气源,将滑块由静止释放,滑块上的挡光片通过光电门的时间为t,则滑块通过光电门的速度为(用题中所给字母表示);
-
(3) 开始实验时,细线另一端挂有6个钩码,由静止释放后细线上的拉力为F1 , 接着每次实验时将1个钩码移放到滑块上的方盒中,当只剩3个钩码时细线上的拉力为F2 , 则F12F2(填“大于”、“等于”或“小于”);
-
(4) 若每次移动钩码后都从同一位置释放滑块,设挡光片距光电门的距离为L,钩码的个数为n,测出每次挡光片通过光电门的时间为t,测出多组数据,并绘出 n﹣
 图象,已知图线斜率为k,则当地重力加速度为(用题中字母表示).
图象,已知图线斜率为k,则当地重力加速度为(用题中字母表示).
-
(1)
在图1的方框中画出实验电路图,要求测量误差尽可能小.

-
(2)
根据电路图,在图2的实物图上连线(注意电表量程的选择).

-
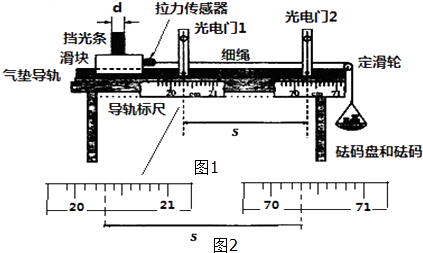
(1) 将气垫导轨调至水平,安装好实验器材,从图2中读出两光电门中心之间的距离S=cm;
-
(2) 测量挡光条的宽度d,记录挡光条通过光电门1和2所用的时间△t1和△t2 , 并从拉力传感器中读出滑块受到的拉力F,为了完成实验,还需要直接测量的一个物理量是;
-
(3) 该实验是否需要满足砝码盘和砝码的总质量远小于滑块、挡光条和拉力传感器的总质量?(填“是”或“否”)
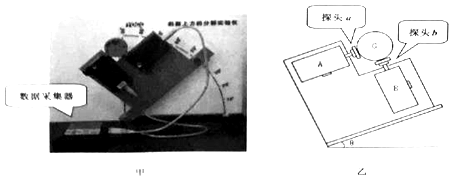
该装置中,A、B为力传感器,研究对象是质量m=310g的金属圆柱体G,将G放在A、B的两探头之间,两探头受到压力的数据,通过传感器、数据采集器传输给计算机,数据如表1所示.
表1 圆柱体的质量:310g
θ/° | 0 | 30 | 45 | 60 | 90 |
FA/N | 0.00 | 1.49 | 2.12 | 2.59 | 3.02 |
FB/N | 3.01 | 2.61 | 2.13 | 1.50 | 0.00 |
-
(1) 观察、分析数据表1,可得出:金属圆柱体重力沿斜面向下的分力FA随斜面倾角θ的增大而,垂直斜面向下的分力FB随斜面倾角θ的增大而.
-
(2) 某同学发现两传感器的读数并不是与角度的变化成正比,他猜想圆柱体所受重力及其分力间满足某个函数关系,并根据该函数关系计算两探头受到压力的理论值如表2所示(g取9.8m/s2)
表2 圆柱体的质量:310g
θ/°
0
30
45
60
90
FA/N
0.00
1.52
2.15
2.63
3.04
FB/N
3.04
2.63
2.15
1.52
0.00
该同学猜测的函数关系式应当分别为:FA=,FB=(用金属圆柱体质量m、重力加速度g、斜面倾角θ表示)
-
(3) 在实验中无论是分析“表1”还是“表2”的数据时,都认为传感器的读数都等于相应的圆柱体重力的分力,其物理学依据是(乙沿斜面方向为例);因为A传感器的读数等于A传感器所受的压力,根据此压力大小等于圆柱体沿斜面方向所受的支持力,而根据此支持力大小等于圆柱体重力沿斜面方向的分力
-
(4) 为了减少实验误差,可采取的办法是(写出一个即可)
-
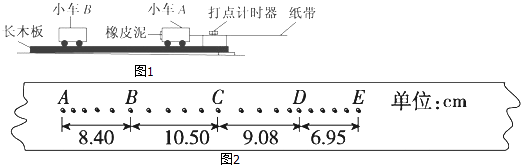
(1) 若已得到打点纸带如图2所示,并测得各计数点间距(标在图上).A为运动起点,则应该选择段来计算A碰前的速度,应选择段来计算A和B碰后的共同速度.(以上空格选填“AB”、“BC”、“CD”、“DE”)
-
(2) 已测得小车A的质量m1=0.40kg,小车B的质量m2=0.20kg,由以上测量结果可得碰前m1v0=kg•m/s,碰后(m1+m2)v共=kg•m/s,由此得出结论.(计算结果保留三位有效数字.)
 、k均为常数
、k均为常数  将传感器固定在物体上,保持通过霍尔元件的电流I不变
将传感器固定在物体上,保持通过霍尔元件的电流I不变  方向如图所示
方向如图所示  ,当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同
,当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同  则( )
则( )
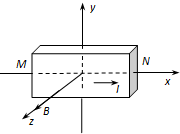
 与上、下表面的距离有关
B . 当物体沿z轴方向移动时,上、下表面的电势差U变小
C . 传感器灵敏度 与通过的电流有关
D . 若图中霍尔元件是电子导电,则下板电势高
与上、下表面的距离有关
B . 当物体沿z轴方向移动时,上、下表面的电势差U变小
C . 传感器灵敏度 与通过的电流有关
D . 若图中霍尔元件是电子导电,则下板电势高
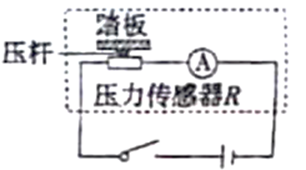
| 压力F/N | 0 | 250 | 500 | 750 | 1000 | 1250 | 1500 | …… |
| 电阻R/Ω | 300 | 270 | 240 | 210 | 180 | 150 | 120 | …… |
请回答:
-
(1) 该秤零起点(即踏板空载时)的刻度线应标在电流表刻度盘A处。
-
(2) 如果某人站在该秤踏板上,电流表刻度盘的示数为20mA,这个人的体重是kg。
设计电路图如图所示,并按如下步骤进行操作。

⑴按电路图连接好实验器材。
⑵将滑动变阻器滑片P滑到(填“a”或“b”)端,单刀双掷开关S掷于(填“c”或“d”)端,调节滑片P使电流表满偏,并在以后的操作中保持滑片P位置不动,设此时电路总电阻为R,断开电路。
⑶容器中倒入适量开水,观察标准温度计,每当标准温度计示数下降5℃,就将开关S置于d端,并记录此时的温度t和对应的电流表的示数I,然后断开开关。请根据温度表的设计原理和电路图,写出电流与温度的关系式I=(用题目中给定的符号)。
⑷根据对应温度记录的电流表示数,重新刻制电流表的表盘,改装成温度表。根据改装原理,此温度表表盘刻度线的特点是:低温刻度在(填“左”或“右”)侧,刻度线分布是否均匀?(填“是”或“否”)。
-
(1) 先用多用电表的欧姆挡测量其电阻,其正向电阻约为10 Ω,反向电阻约为50 kΩ,则在测量二极管的正向电阻时,电表的红表笔应接(填“A”或“B”)端.
-
(2) 该同学设计了如图所示的电路用伏安法进一步测量该二极管正、反向电压均为2 V时的电阻值,二极管接在1、2之间,电压表的内阻约为40 kΩ,选用多用电表的直流电流挡作为电流表接在3、4之间.该多用电表的直流电流有三个量程,量程和对应的内阻分别为:①50 μA,内阻约为100 Ω;②50 mA,内阻约为50 Ω;③250 mA,内阻约为10 Ω.则在实验过程中,多用电表的红表笔应与接线柱(选填“3”或“4”)相连;测二极管的反向电阻时电流表的量程应选用(选填“①”“②”或“③”),单刀双掷开关S2应拨向接点(选填“5”或“6”).




