一 系统及其特性 知识点题库
一个企业是由管理部门、生产部门、营销部门、供应部门等各个部分组成的整体,任何一个部门都不可能单独实现企业的目标,只有按照一定的生产和管理规律,各个部门共同合作,才能完成任务。这说明( )
A . 系统的整体功能大于各组成部分的功能之和
B . 企业就是由各个部门的功能简单相加
C . 各个部门不合作也能完成任务
D . 企业中有些部门是用不着的
海南中学所使用的多媒体教学平台由电脑、投影、展示台、控制面板等多个部分组成,当平台中的控制面板没有接通电源的情况下,那么这一教学平台中的投影、电脑、展台等将无法正常使用,对于该平台,以下说法错误的是( )
A . 多媒体教学平台是有多个要素组成的有特定功能的有机整体。
B . 多媒体教学平台中的各各组成部分是相互联系、相互作用的。
C . 多媒体教学平台中的某一部分出现故障时,就会影响到整体功能的发挥。
D . 对多媒体教学平台进行分析时,要先分析部分,再分析整体,先看局部,再看全局。
在下列关于系统说法中,哪个是有关相关性的理解?( )
A . 一个系统往往存在多个目标,这些目标还常常不一致,需要进行协凋
B . 系统通常都是由若干部分组成的
C . 系统各组成元素之间、部分和整体之间不仅相互关联,相互作用,而且任何一个组成部分发生变化,都会影响其它部分和整体任务的完成。
D . 系统包含子系统,它又是更大系统的子系统
如图所示为光伏发电太阳自动跟踪系统,它可以始终保持阳光和太阳能电池面板垂直,以提高光伏发电效率。其工作过程是:当太阳位置发生偏移,检测装置接收到因光线角度改变而产生的电信号,经控制电路处理后,驱动步进电机1带动转轴转动、步进电机2带动丝杆转动,使太阳能电池面板与太阳光线的实际角度保持垂直状态。

-
(1) 该系统的控制方式属于(在“①开环控制;②闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 该系统的执行器是(在“①转轴;②丝杆;③步进电机”中选择合适的选项,将序号填入横线处);
-
(3) 自动跟踪系统中的检测装置应选用(在“①温度传感器;②湿度传感器;③光强度传感器”中选择合适的选项,将序号填入横线处);
-
(4) 当遇到大风或雷雨等特殊天气时,系统将自主响应启动调节步进电机2,使太阳能电池板高度很快降低,并实现0角度放置,这体现了系统的(在“①整体性;②相关性;③目的性;④动态性;⑤环境适应性”中选择合适的选项,将序号填入横线处);
-
(5) 为了进一步提高光伏装置的发电效率,下列对该系统优化的有效措施是 和(在“①提高步进电机转动速度;②采用低铁超白玻璃减少光的反射;③增加聚光元件及对应的聚光光伏系统;④增加风向风速仪及对应的风速风向监测系统”中选择合适的选项,将序号填入横线处)。
如图所示是考场无线电监管车,载有频谱分析仪、接收机、测向机、电脑、显示器、发射天线等。找到可疑无线电信号后,测向机则会对信号进行定位,工作人员将根据定位的方向,锁定可疑信号的准确位置。下列不正确的是( )

A . 考场无线电监管车能在众多无线电信号中自动查找可疑信号,体现系统的目的性
B . 该系统由频谱分析仪、接收机、测向机、电脑等组成,体现系统整体性
C . 配备防震性能,减少车辆行驶过程中损坏的可能性,体现系统的环境适应性
D . 车内频谱分析仪、接收机、测向机、电脑等设备相互影响,体现系统的整体性
房车兼具“房”和“车”两大功能,但其属性还是车,是一种可移动、具有居家必备的基本设施的车。车上的居家设施有“卧具、炉具、厨具、沙发、餐桌椅、空调、电视”等家具和电器,可分为驾驶区域、起居区域、卧室区域、卫生区域、厨房区域等。从系统的角度分析,下列说法不正确的是( )
A . 具有居室和车辆的功能,体现了系统的目的性
B . 系统中任何部件出现故障,都将影响房车系统的运行,体现了系统的整体性
C . 系统能适应不同的路面和气候条件,体现了系统的环境适应性
D . 系统中的驾驶、起居、卫厨等区域的子系统相互影响,体现了系统的动态性
无人驾驶汽车是智能汽车的一种,需要计算机系统与汽车系统的有机整合。其主要工作原理是:计算机系统根据用户选定的目的地自动规划行车路线,导航系统会实时检测行车路线是否偏移,通过计算机控制转向系统修正路线;行驶中利用车载传感器来感知车辆周围环境,计算机根据车载传感器所获得的道路、车辆位置和障碍物等信息,及时控制转向系统和制动系统,实现避让和超车,从而使车辆能够安全、可靠地在道路上行驶。据此回答下题。
-
(1) 关于无人驾驶汽车系统,下列说法错误的是( )A . 可分为导航子系统、计算机子系统、转向子系统和制动子系统等 B . 若计算机系统处理不及时会导致避让不及时而发生事故,体现了系统的动态性 C . 能适用于不同交通状况的道路,体现了系统的环境适应性 D . 设计时既要考虑性能可靠,又要兼顾成本等因素,体现了系统分析的综合性原则
-
(2) 关于无人驾驶汽车的工作原理,下列分析说法 不正确的是( )A . 需要用户自己设置目的地,因此还不是自动控制 B . 无人驾驶汽车沿规划路线行驶的控制,可设计成闭环控制 C . 无人驾驶汽车避让和超车的控制,可设计成开环控制 D . 沿规划路线行驶过程中干扰因素包括其它车辆和障碍物
-
(3) 汽车的悬挂系统是指车身与车轮之间的支撑系统,由弹簧、避震器等组成。在如图所示的悬挂系统中,车轴分成两段,当遇到路面不平时,一侧车轮的跳动对车身的影响比较小,从而提高了汽车行驶的平稳性。关于该悬挂系统,下列说法不恰当的是( )
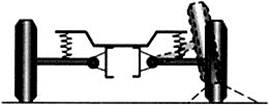 A . 可以作为汽车系统的一个子系统 B . 具有支撑功能,体现了系统的动态性 C . 能使汽车更好地适应多种路况 D . 有利于提高汽车的整体性能
A . 可以作为汽车系统的一个子系统 B . 具有支撑功能,体现了系统的动态性 C . 能使汽车更好地适应多种路况 D . 有利于提高汽车的整体性能
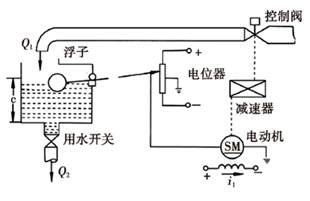
如图所示是水位自动控制系统。通过电位器的作用经由电动机,减速器,控制阀(阀门)输出水量,由于水箱有进水量的变化,放置浮子将液位信号反馈到电位器上。电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱中流入水量与流出水量相等,从而液面保持在希望高度上。一旦流入水量或流出水量发生变化,水箱液面高度便相应变化。根据材料和示意图回答问题。
-
(1) 下列关于该水位自动控制系统,从系统的角度分析,下列说法中正确的是( )A . 该系统有多个部件相互联系组成,体现了系统的相关性 B . 当电位器出现故障停止工作时,电动机也跟着停机,体现了系统的动态性 C . 要提高水位,水箱的容量属于影响因素,而浮球的位置属于限制条件 D . 电动机既是该系统的一个子系统,也可以是该系统的一个要素
-
(2) 从控制角度分析,下列说法中不正确的是( )A . 对减速器的控制中,控制量是电动机的转速 B . 电位器是水位控制系统的控制器 C . 出水量是该系统的干扰因素 D . 浮子检测到的水位信号是水位控制系统的输入量
下图为小陈设计的一款分拣器的原理图。该分拣器系统可分为传送子系统和分拣子系统。当按下设备电压按键后,电机运转,带动传送带传送物料。当传感器检测到的物料材质为对应材质时,由PLC控制柜控制相应的气缸推出,使物料离开传送带,进入相应滑槽。实现不同物料分类的功能。根据材料题意完成小题。

-
(1) 对于该分拣器,从系统的角度分析正确的是( )A . 当铝质传感器出故障时,将会导致系统无法识别铝质物料,主要体现系统的环境适应性 B . 传送子系统中的电机与分拣子系统中的气缸毫无关联 C . 既要考虑分拣效率,也要考虑由此带来的分拣错误等问题,体现系统分析的综合性原则 D . 三种材料传感器的排布顺序属于该系统优化的约束条件
-
(2) 分拣控制子系统主要是让不同物料分类,在该子系统中,若将物料作为被控对象,下列分析正确的是( )A . 该控制系统属于闭环、自动控制 B . 执行器是PLC控制器 C . 输入量是物料的运行速度 D . 控制量是气缸的伸缩量
汽车电子稳定控制系统((ESP)用于实时监控汽车的行驶状态,当车辆转向角度过大或过小时,使其避免偏离理想轨迹,帮助驾驶员轻松操作。其控制原理是通过ECU计算出保持车身稳定的理论值,与偏航率传感器测得的数据进行比较,发出平衡纠偏指令牵制发动机动力输出,对各个车轮进行有目的的制动,自动纠正车辆轨迹。根据上述描述完成问题。

-
(1) 下列关于该系统的说法中,不正确的是( )A . 能帮助驾驶员轻松操作驾驶,体现了系统的目的性 B . ESP实时监控汽车的行驶状态,体现了系统的动态性 C . 驾驶员的操作会影响汽车的行驶状态,体现了系统的整体性 D . ECU需要对检测信号进行处理与计算,体现了系统分析的科学性原则
-
(2) 下列关于汽车电子稳定控制系统的分析正确的是( )A . 发动机是被控对象 B . 控制量是平衡纠偏指令 C . 输入量是驾驶员的操作及实际行驶状态 D . ECU对传感器测得的数据进行比较与分析
如图所示是智能家居示意图。通过网络将智能家电、中央空调和安全监控等与计算机连接,构建了高效的住宅设施与家庭事务管理系统,提升了家居的安全性、便利性和舒适性。下列关于该系统的说法中错误的是( )

A . 网络故障会影响该系统对各子系统的管理,体现了系统的整体性
B . 该系统能随时了解和处理家中发生的状况,体现了系统的相关性
C . 该系统能抵抗外界干扰信号的影响,体现了系统的环境适应性
D . 该系统提升了家居的安全性、便利性和舒适性,体现了系统的目的性
如图所示是由燃气热水器、回水器和水管等组成的热水循环系统,工作时冷水进入燃气热水器,加热后热水流出,通过回水器使热水在回水管道中循环,使得在使用时能较快地流出热水。从系统的角度分析,下列说法中不恰当的是( )

A . 该系统由燃气热水器、回水器和水管等要素组成
B . 单向阀保证了回水管道中的热水不会逆流,体现了系统的目的性
C . 系统根据热敏传感器通过控制单元计算出出水温度并显示,体现了系统分析的科学性原则
D . 燃烧器功率是水温控制优化的约束条件
小明把自家的简易鱼缸通过摆景观石、铺底砂、种水草等环节后,改造成生态鱼缸;为鱼缸加装了加水装置,实现水位低于某高度时,系统自动加水.请按要求完成以下题目:

-
(1) 下列描述不正确的是(A .生态量缸是—个系统,水草、鱼、水等为其要素且相互联系,相互作用;B .小明拟订有效的改造方案,完美实现鱼缸生态形成,这是系统分析的结果;C .鱼缸系统具有整体性、目的住、相关住、动态性、环境适应佳等基本特性;D .鱼缸晚间照明系统有安全隐患,小明可主要考虑照明效果,暂时忽视安全)。
-
(2) 鱼缸水位控制中,水管注水到设定水位时,电极式水位传感器发回信号,控制装置开始控制关闭进水阀门后停止注水,下列判断正确的是(A .进水阀门是控制器;B .水位传感器是执行器;C .水管是被控对象;D .水位传感器是检测装置)。
-
(3) 改造后的生态鱼缸水位控制属(A .开环、自动控制;B .闭环、自动控制;C .开环、手动控制;D .闭环、手动控制)。
-
(4) 生态鱼缸水位控制框图中①处所指的是(A .反馈;B .系统;C .控制;D .干扰)。

如图所示是风力发电系统的示意图。风力发电的原理是利用风带动风车叶片旋转,再通过增速器提高旋转的速度,带动发电机发电。其中发电机功率控制子系统:风向标和测速仪分别检测风向和风速,风向和风速信号送入控制柜中进行数据处理,若风速低于一定值时,控制柜发出指令,偏航电机转动,改变风轮朝向和叶片桨距角使风力发电机组输出最大的功率。
-
(1) 从系统的角度分析,下列说法中不恰当的是( )
 A . 该系统主要有塔架、发电机、增速齿轮箱、叶片、电控系统等组成,体现了系统的整体性 B . 既要考虑发电机功率大小,又要考虑风力发电系统安装地环境等,体现了系统分析的综合性原则 C . 该系统优化时,要从整体出发,以系统整体功能的最优为目的 D . 设计团队的人员分工及设计计划等是系统优化的约束条件
A . 该系统主要有塔架、发电机、增速齿轮箱、叶片、电控系统等组成,体现了系统的整体性 B . 既要考虑发电机功率大小,又要考虑风力发电系统安装地环境等,体现了系统分析的综合性原则 C . 该系统优化时,要从整体出发,以系统整体功能的最优为目的 D . 设计团队的人员分工及设计计划等是系统优化的约束条件 -
(2) 对于发电机功率控制子系统,下列说法正确的是( )A . 输入量是风向标和测速仪 B . 系统有检测装置,控制方式是闭环控制 C . 被控对象是发电机 D . 引起被控量发生变化的因素都是干扰因素
我国自主研发的“蛟龙号”载人潜水器由耐压系统、密封系统、自动控制系统、水下定位系统、水下通信系统等多领域前沿技术组成,大大提升了潜水器的功能,体现了系统的( )
A . 独立性
B . 互补性
C . 整体性
D . 片面性
如图所示为一款网球发球机。储球箱用于盛放网球,下球装置可对网球进行搅动,使球落入导球管后进入滚道,通过电机驱动的摩擦飞轮加速后从滚道出口发射出去。电机驱动控制器中的单片机通过设定的参数控制调速模块产生相应的脉冲信号,进而控制电机的转速,实现网球球速的控制。请根据示意图及描述完成下面小题。

-
(1) 下列关于网球发球机系统的分析中正确的是( )A . 机架的结构影响发球机的强度和稳定性,体现系统的动态性 B . 摩擦飞轮过度磨损会影响发球效果,体现系统的整体性 C . 导球管的粗细是该系统优化的约束条件 D . 在确定飞轮与滚道间距时充分考虑网球大小和摩擦力等参数,体现系统分析的综合性原则
-
(2) 下列关于电机转速控制子系统的分析中正确的是( )A . 执行器是单片机 B . 被控对象是网球 C . 下球装置对网球的搅动属于干扰因素 D . 控制量是调速模块产生的脉冲信号
如图是一装有自动驾驶系统的汽车,汽车自动驾驶系统有以下部分组成:自适应巡航控制系统(它会和前面的车辆保持一个恒定的距离)、车道偏离检测系统、自动泊车系统、紧急制动和卫星导航系统。关于汽车自动驾驶系统以下说法错误的是( )

A . 自动驾驶系统的功能是各个子系统所没有的,体现了系统的整体性
B . 自适应巡航控制系统在恶劣天气环境中仍能正常工作,体现了系统的环境适应性
C . 当卫星导航系统出现故障时,自动驾驶系统就会受到影响,体现了系统的动态性
D . 道路的拥堵情况是自动驾驶系统优化的约束条件
如图所示为希罗自动门,祭坛点火使容器1中的空气膨胀,将水压人容器2,利用水的重力使轴3转动,将门打开。当火熄灭时,庙门在重锤的作用下自动关闭。根据描述,下列说法不正确的是( )

A . 利用气压为动力打开庙门,体现了系统的目的性
B . 重锤质量增加,需相应增加容器2中水的质量,体现了系统的相关性
C . 设计时先考虑容器1,再考虑容器2,体现了系统分析的整体性原则
D . 设计时根据开、关门所需力的大小,计算出重锤和水的质量,体现了系统分析的科学性原则
如图所示为物料自动混合控制系统示意图,当物料A下落到电子皮带上时,压力传感器将测得的数据传送到PLC与给定值进行比较,根据比较结果调节变频电机M1的转速,从而控制物料A的给料量。物料B为液体物料,液位传感器将检测到的液位信号传送到PLC,由PLC控制调节阀的开度,从而控制物料B的给料量。搅拌电机M2能根据搅拌器中液位变化,实时调整电机M2的转速。请根据示意图及描述完成以下任务:

-
(1) 物料B液位控制子系统的控制方式属于 (在“A .开环控制;B .闭环控制”中选择合适的选项, 将序号填入横线处);
-
(2) 根据液位变化,搅拌电机M2实时调整电机转速,下列系统特性中没有体现的是 (在“A .目的性; B .动态性; C .相关性; D .环境适应性”中选择合适的选项,将序号填入横线 处);
-
(3) 设计该系统时,根据PLC和供电电源电压等参数选用电动机,体现了系统分析的 (在“A .综合性原则;B .科学性原则; C .整体性原则”中选择合适的选项, 将序号填入横线处);
-
(4) 为了保证容器中物料A与物料B的配比合适,合理的措施是 (在“A .将调节阀改为手动控制;B .加快电子皮带的传动速度; C .优化PLC的算法,提高PLC的控制精度;D .减慢搅拌电机M2的转速”中选择合适的选项,将序号填入横线处);
-
(5) 下列属于物料A给料控制子系统干扰因素的是 (在“A .改变设定物料A的给料量; B .搅拌电机M2的性能老化; C .PLC输出信号异常”中选择合适的选项,将序号填在横线处);
如图所示为太阳能热水器的原理图,阳光充足时,利用太阳能加热。天气不好时,可使用电加热器辅助加热。请根据示意图及其描述完成下面小题。

-
(1) 下列关于该系统的分析中不正确的是( )A . 电磁阀的性能是影响该系统优化的因素 B . 温度探头的精度影响电加热器的工作,体现了系统的相关性 C . 能根据天气的情况选择不同的加热方式,体现了系统的动态性 D . 设计系统时,对给进水、出水流量进行定量分析,体现了系统分析的科学性原则
-
(2) 下列关于该电加热器辅助加热控制系统的分析不正确的是( )A . 控制方式是闭环控制 B . 进水水温的变化属于影响因素 C . 温度探头是检测装置 D . 控制量是电加热器的功率
最近更新



