三 闭环控制系统的工作过程 知识点题库
如图所示为纸浆浓度控制系统工作原理示意图,其工作原理是:控制器将传感器检测到的配浆浓度与设定值相比较,根据偏差值控制电动调节阀调节清水流量,从而使配浆浓度达到设定值。请回答问题。

-
(1) 该控制系统的传感器应该选用( )A . 浓度传感器 B . 流量传感器 C . 压力传感器 D . 温度传感器
-
(2) 该控制系统的输入量及输出量分别是( )A . 清水流量;配浆流量 B . 原浆浓度;配浆浓度 C . 纸浆浓度的设定值;实际配浆浓度 D . 取样检测浓度;配浆浓度设定值
中国家电行业的传奇——海尔公司在2010年柏林国际电子消费品展销会上推出了一款人力洗衣机。这款环保洗衣机可以将配套的动感自行车健身器材在使用时所产生的人力能量,经过能量转换器变成电能,用于驱动洗衣机清洗衣物。20分钟的运动可以支持洗衣机用冷水清洗一次常量衣物,算得上是一款从侧面督促您健身,保持健康生活状态的实用家电了。请根据上述说明,完成以下任务:

-
(1) 该控制系统的控制方式属于控制(在①开环;②闭环中选择一项,将序号填写在横线处);
-
(2) 该控制系统的控制手段属于(在①手动控制;②自动控制中选择一项,将序号填写在横线处);
-
(3) 该控制系统的输出量是(在①人脚踩的力;②衣物;③洗衣机运行或停止中选择一项,将序号填写在横线处);
-
(4) 人运动速度越快,洗衣机就洗的越快,从系统的特性分析,这体现了系统的(在①环境适应性;②相关性;③动态性中选择一项,将序号填写在横线处);
-
(5) 洗衣机洗衣物时会受到各种干扰,以下因素中不属于干扰因素的是(在 ①中途加衣物;②中途加水;③人脚踩的速度中选择一项,将序号填写在横线处)。
下列家用电器的控制系统中,属于闭环控制系统的是( )
A . 电吹风的风量控制系统
B . 电冰箱的温度控制系统
C . 电风扇的定时控制系统
D . 调光台灯的亮度控制系统
如图所示的智能扫地机器人自动工作、自动充电,智能机器人通过电量传感器判定内部电池电量,该电量信息被传送到控制模块,并由控制模块判断是否需要充电。如果电量低于设定电量,控制模块就会做出需要充电决定,机器人充电器自动识别底座,引导机器人进行充电,直至充满。


-
(1) 根据自动充电原理的描述,补充完整方框图,在横线处填写相应内容。
①;②;③;④。
-
(2) 为防止充电座被其他物体遮挡或防止机器人进入后无返回的路线,设计师们常需要对常用家具底部高度与家具支撑脚宽度做大量的科学分析与数学统计,这体现了系统分析原则。
-
(3) 该扫地机器人遇到以下情况工作不会遇到问题的是(在①沙发与地面间隙过大;②房间之间有台阶;③工作区域有干扰源中选择一项,将序号填写在横线处)。
智能球—门线技术又称门线监视系统,是将微型传感器植入足球内,在禁区草皮下方铺设线缆,通电后可产生磁场,当球越过门线时,传感器会将信号传递给裁判员。对该控制系统下列说法不正确的是( )

A . 用传感器代替人感知球是否越过门线,属于功能模拟方法
B . 通过输入输出信号来判断传感器的工作状态的方法属于黑箱方法
C . 传感器检测球是否越过门线的过程属于反馈
D . 传感器过门线时接收的电磁信号属于输入信号
汽车自动感光头灯可以让驾驶员更专注于汽车驾驶,汽车前挡风玻璃后的感光探头检测外界光线强弱,控制电路根据探头检测信号判断是否达到开灯条件,如果太暗则继电器接通,车头灯开启照明。请根据上述说明,完成以下任务:
-
(1) 根据描述在车头灯自动开关控制系统方框图中横线处填写相应的内容;

① ② ③
-
(2) 为了实现车头灯开关的准确控制,需要进行大量的技术试验和数据统计,这体现了系统分析的原则(在①整体性;②科学性;③综合性中选择一项,将序号填写在横线处);
-
(3) 该控制系统的感光探头在检测外界光线强弱时会受到各种干扰,以下因素中不属于干扰因素的是(在①雨雾;②探头上的积灰;③前挡风玻璃的防晒贴膜中选择一项,将序号填写在横线处)。
风力发电机运行时风轮对准风向才能获得最大风能,如图所示是风力发电机跟踪风向的控制系统示意图,风向测定装置将检测到的风向信号传递给迎风控制装置与设定值比较,迎风控制装置根据角度偏差信号控制偏航电机运转,调整风轮角度,使风轮始终对准风向。

-
(1) 根据描述,在跟踪风向的控制系统方框图中的横线处填写相应的内容;

① ② ③ ④ ⑤
-
(2) 风向测定装置将检测到的风向信号传递给迎风控制装置与设定值比较的过程称为。(从干扰;反馈;控制 中选择一项,将正确填在横线处)
如图所示是一款带有电子控制燃油喷射系统的发动机。该系统的工作原理是:把通过实验室确定的发动机各工况的最佳供油参数预先存入电脑,在发动机工作时,传感器把检测到的发动机负荷、转速、加速与减速、进气温度、冷却液温度等变化情况转化为电信号并输出到微电脑(控制盒),微电脑经过运算处理,计算出最佳喷油量,控制电磁阀门的打开、关闭时间,从而控制喷嘴的喷油量。请根据上述描述完成问题( )

-
(1) 从系统角度分析,下列说法不正确的是( )A . 各传感器检测到的信号将直接影响电磁阀门打开、关闭时间,体现了系统的相关性 B . 系统喷油量精度直接依赖于存入电脑的基准供油参数和喷油器调整标定的精度,体现了系统整体性 C . 该系统能够根据发动机负荷、转速、加速与减速、进气温度、冷却液温度等因素,控制喷嘴的喷油量,体现了系统分析的科学性 D . 设计该系统时,既要考虑系统的制造成本,又要考虑日后的维护成本,体现了系统分析的综合性原则
-
(2) 关于该电子控制燃油喷射系统下列说法中不正确的是( )A . 该控制系统是开环控制系统 B . 输入量是设定的供油参数 C . 控制量是电磁阀门打开、关闭 D . 进气温度的变化不属于该系统的干扰因素
如图所示为高层楼房自动稳压供水控制系统原理图,其工作原理是:当用户用水量变化时,管道中的水压发生变化,检测装置把检测到的水压信号反馈给控制器,与设定水压进行比较,控制器根据偏差值控制电机及水泵的转速,调节供水量,保持管道中的水压稳定。

-
(1) 根据示意图及其描述,在控制系统方框图中横线处填写与自动稳压供水控制系统 原理图中相对应的内容。

① ② ③ ④
-
(2) 请为该系统的检测装置选择一个合适的传感器(从水温传感器、水压传感器、水位传感器中选择一个,填在横线处。
如图所示为办公室室内湿度控制系统示意图。当传感器检测到室内湿度达到设定值的上限时,控制器发出信号,接通风扇及压缩机和热交换器的电源,风扇将潮湿空气抽入机内,通过热交换器的作用将空气中的水分子冷凝成水珠,降低空气中的含水量。当室内湿度达到设定值的下限时,断开风扇及压缩机和热交换器的电源。请根据示意图和描述,完成以下任务:

-
(1) 该系统的控制手段和控制方式分别属于和(在“①手动控制;②自动控制;③开环控制;④闭环控制”中选揮合适的选项,将序号填写在横线处);
-
(2) 该系统的被控对象是(在“①风扇:②压缩机和热交换器;③办公室;④“控制器”中选择合适的选项,将序号填写在横线处)
-
(3) 该系统的传感器应选用(在“①温度传感器;②湿度传感器;③压力传感器;④流量传感器”中选择合适的选项,将序号填写在横线处);
-
(4) 为了提高该系统的除湿效果,有效的优化措施是在和(在“①加大风扇的转速;②提高传感器的灵敏度;③降低湿度的设定值;④加大压箱机和热交换器的功率”中选择合适的选项,将序号填写在横线处)。
如图所示是地铁列车自动到站停车控制系统和车站屏蔽门自动控制系统的结构示意图。ATC设备安装在地铁列车和轨道上,检测地铁列车的速度和位置,ATC设备输出信号给CCU,CCU通过控制动力和制动设备;使地铁列车精准的停在轨道预设位置上;地铁列车精准的停在轨道的预设位置后,电子电路控制电机及传动装置,车站屏蔽门打开。请根据结构示意图及其描述完成小题。

-
(1) 从系统的角度分析,下列说法不正确的是( )A . 地铁列车自动停车控制系统和屏蔽门自动控制系统都是地铁控制系统的子系统 B . ATC设备出现故障,两个控制系统将不能正常工作,体现了系统的整体性 C . 地铁列车自动停车控制系统提高了停车的效率和准确性,体现了系统的目的性 D . 地铁列车精准位置停止,屏蔽门打开,体现了系统的动态性
-
(2) 下列关于两个控制系统的分析中不正确的是( )A . 地铁列车自动停车控制系统被控量是地铁列车 B . 地铁列车自动停车控制系统能实现列车精准停车控制 C . 电机是屏蔽门自动控制系统的执行器 D . 屏蔽门自动控制系统的被控对象是屏蔽门
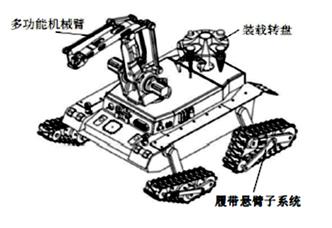
如图所示四履带月球车,由四履带移动系统、可分离检测系统和多功能机械臂系统等构成。行走在沙石地面时,履带悬臂子系统会抬起适当高度,保护车身;内部的检测机器人可从月球车分离,体型小巧,能探测月球车难以到达的区域;多功能机械臂由机械臂和装载转盘组成,转盘上载有机械爪、摄像头、铲斗和钻头四个构件,可实现挖掘、抓取、探测等工作。请完成问题。
-
(1) 从系统角度分析,下列对月球车的分析不正确的是( )A . 当机械臂出现问题时,月球车不能实现挖掘、抓取、探测等功能,体现系统的整体性 B . 履带悬臂子系统根据沙石地面情况抬升月球车高度,体现该子系统的目的性 C . 优先使用机械臂探测,难以探测时改用检测机器人探测,体现系统分析的综合性原则 D . 月球车上设备的空间分布、各部分的重量等都是系统优化的影响因素
-
(2) 月球车检测到研究对象时,控制台发出指令,电机运转,机械臂与装载转盘旋转后对齐,以便更换构件。以下关于该控制系统的描述,说法正确的是( )A . 控制台输出的信号是控制量 B . 机械臂与装载转盘是被控对象 C . 该控制过程存在反馈 D . 检测到研究对象的信号属于干扰因素
下列选项中不属于黑箱方法的是:( )。
A . 通过拍打西瓜表面来判断西瓜成熟情况
B . 国际象棋中的人机对弈
C . 用万用表去测试一段电路是否断路
D . 中医看病的“望、闻、问、切”
下图是燃油发动机的转速控制示意图。调节臂能控制阀门开启的大小,当发动机的转速超出设定转速时,飞球离心力增大,调节臂向上移动,在杠杆作用下压杆下移,使阀门通孔截面积减小,发动机汽缸内进油减小,发动机转速下降。反之亦然。请根据以上描述,完成以下任务:

-
(1) 该控制系统的控制手段和控制方式分别属于和(在①开环控制;②闭环控制;③手动控制;④自动控制中选择合适的选项,将序号填写在横线处);
-
(2) 该控制系统的被控对象是(在①飞球;②发动机;③调节阀;④调节臂中选择合适的选项,将序号填写在横线处);
-
(3) 该控制系统的控制量、输入量分别是、;
-
(4) 该控制系统用久后,调节阀会老化,要定期更换,这体现了系统的(在①目的性;②相关性;③整体性;④动态性;⑤环境适应性中选择合适的选项,将序号填写在横线处)。
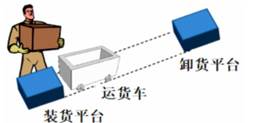
如图所示是某仓储运货工作示意图,运货车的工作过程是:当传感器检测到车上的载货量达到设定值时,控制电路控制电机转动,车驶离装货平台;当车上的限位开关接触到卸货平台,电机停止转动,车停下等待卸货;当传感器检测到货物被卸,电机反向转动,车返回装货平台。下列关于该控制系统的分析中正确的是( )
A . 该控制系统的输入量是货物
B . 该控制系统的被控对象是卸货平台
C . 该控制系统的控制量是电机的转速
D . 载货量太多是该控制系统的干扰因素
如图所示为涡轮发动机中采用的离心式调速器的工作原理图。图中支架1与发动机轴相连,离心球2铰接在支架1上,并通过连杆3与活塞4相连。在稳定运转状态下,由油箱供给的燃油一部分通过增压泵7增压后输送到发动机,另一部分多余的油则经过油路a、调节油缸6、油路b回到油泵进口处。当外界条件变化引起阻力矩减小时,发动机的转速w将增高,离心球2将因离心力的增大而向外摆动,通过连杆3推动活塞4向右移动,使被活塞4部分封闭的回油孔间隙增大,因此回油量增大,输送给发动机的油量减小,故发动机的驱动力矩相应地有所下降,机械又重新归于稳定运转。反之,如果工作阻力增加,则作相反运动,供给发动机的油量增加,从而使发动机又恢复稳定运转。关于该涡轮发动机转速控制系统的说法中错误的是( )

A . 涡轮发动机转速是输出量
B . 该控制系统是闭环控制系统
C . 发动机转轴上载荷的变化是该控制系统的干扰因素
D . 该控制系统的被控对象是离心球
水塔水位控制系统一般用于家庭、机关单位、消防、学校、工厂等的水塔上进行自动控制水位,一般要求能实现无人值守,缺水自动补水,水满能自动停止进水。以下是小明设计的水位控制系统示意图,其工作过程如下:超声波探测装置产生的高频脉冲能穿过液体,并能被容器内表面反射回来。反射回来的信号被超声波探测装置接收后,传输给声波分析仪。声波分析仪通过对这个反射波的分析和计算,就可以判断出液位是否达到了预设的位置,继而输出控制信号给进水阀门,从而完成对液位的监控。请完成以下小题:

-
(1) 该水位控制系统的控制方式为,控制手段为(在A .手动控制:B .自动控制:C .开环控制:D .闭环控制中选择合适的序号,填入横线中);
-
(2) 干扰因素广泛存在于各种控制行为当中,以下不属于该水位控制系统干扰因素的是 ;A . 供电电网电压波动 B . 用户正常用水 C . 外界相近频率超声波信号 D . 调整探测装置安装高度
-
(3) 在设计该系统时,分析仪、电磁阀等元件应选择工作状态可靠的,但这样往往又会使设计预算超支,究竟选择什么样的元件比较头疼,这时候我们应考虑运用系统分析的 、。(在A .经济性原则:B .整体性原则;C .综合性原则;D .科学性原则中选择合适的选项,填入横线中)。题中所指“预算”在该系统设计优化中属 (在A .影响因素;B .限制因素:C .约束条件中选择合适的选项,填入横线中)。
如图所示是水箱液位控制系统,当水箱出水量大时,水位下降浮子下沉,带动活塞偏离进水口位置,此时进行补水直到水箱里的水位上升到给定水位,浮子上浮,活塞归位。在这个系统中,浮子、活塞以及两者之间的连杆机构组成一个杠杆系统。回答以下问题:

-
(1) 该控制系统是开环控制还是闭环控制?
-
(2) 该控制系统的输入量和输出量分别是什么?
如图所示为游泳池水pH自动调节系统示意图。游泳池水经溢流水道收集后,会与补充水一起进入循环水管线,在循环水泵驱动下进入过滤器进行彻底过滤,pH检测仪实时检测水的pH,该值被送到伺服控制器与设定的pH进行比较,伺服控制器根据偏差值控制加药计量泵,向循环水中注入浓度为10%的稀盐酸,将游泳池水的酸碱度控制在国家规定的范围内。根据题中所述的控制过程,回答以下问题:

-
(1) 该游冰池水pH自动调节系统的控制方式属于(单选,填字母:A .闭环控制;B .开环控制)。
-
(2) pH检测仪将检测到的水的pH送到伺服控制,与设定值进行比较的过程称为(单选,填字母:A .干扰;B .反馈;C .控制)。
-
(3) 该游泳池水pH自动调节系统的被控对象是 (单选,填字母:A .加药计量泵;B .pH检测仪;C .游泳池中的水)。
-
(4) 该游泳池水pH自动调节系统的输出量是(单选 ,填字母:A .加药计量泵投药量;B .游泳池水的pH;C .循环水泵的抽水量)。
-
(5) 使用段时间后,该游泳池水pH自动调节系统仍在工作,但将游泳池水pH自动改变到低于国家标准,出现该故障的原因不可能是(单选,填字母:A .加药计量泵能加药但计量误差增大;B .pH检测仪检测精度降低;C .伺服控制器的比较精度降低)。
如图所示是石材切别机工作原理图。通过人机界面将石材的切割参数输入控制器,控制器通过继电器控制各个电机工作,工作台将石材移至设定位置,横梁下降,刀盘旋转并沿着横 梁进给,完成切割。电机上的旋转编码器将电机的旋转量转换为计数脉冲信号,送入控制器中进行运算,控制器获得各个方向的间接位移量,并与设定值比较,当达到设定值时控制器控制相应的电机停止转动。请根据下图及其描述,完成小题。

-
(1) 从系统角度分析,下列分析中不正确的是( )A . 切割机由驱动控制子系统、传动子系统、支撑子系统等组成 B . 任何一个电机损坏,都会影响切割机的工作,体现了系统的动态性 C . 设计时建立数学模型,将切割参数转化为控制参数,体现了系统分析的科学性原则 D . 在移动部件上安装位移传感器获得实际位移量,有利于提高控制精度
-
(2) 该切割机的电机驱动控制系统中的被控对象是( )A . 电机 B . 刀盘 C . 横梁 D . 石材
最近更新



