浙江省精诚联盟2021-2022学年高三上学期通用技术12月适应性联考试卷
浙江省精诚联盟2021-2022学年高三上学期通用技术12月适应性联考试卷
教材版本:通用技术
试卷分类:通用技术高三上学期
试卷大小:1.0 MB
文件类型:.doc 或 .pdf 或 .zip
发布时间:2024-05-01
授权方式:免费下载
下载地址:点此下载
教材版本:通用技术
试卷分类:通用技术高三上学期
试卷大小:1.0 MB
文件类型:.doc 或 .pdf 或 .zip
发布时间:2024-05-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | |
|
如图所示的一款无线洗车机。从人机关系角度,下列分析中不正确的是( )
A . 洗车机可选多种颜色,主要考虑了人的心理需求
B . 手柄尺寸的确定,主要考虑了人的静态尺寸
C . 多种喷射水形,不伤车身,实现了人机关系的安全目标
D . 出水量大,水压稳定,实现了人机关系的高效目标
|
|

| 2. 单选题 | |
|
如图所示是一款液压千斤顶及其评价坐标图。根据坐标图,下列分析中不恰当的是( )
A . 可以作为千斤顶、电钻和打气筒使用,非常实用
B . 界面按钮一键升降,操作简单
C . 体积较小,携带比较方便
D . 相比较其他千斤顶,成本较低
|
|

| 3. 单选题 | |
|
通用技术课上,小明设计了如图所示的零件,图中漏标的尺寸共有( )
A . 2处
B . 3处
C . 4处
D . 5处
|
|

| 4. 单选题 | |
|
通用技术课上,小明设计了如图所示的零件,用厚度为12mm的钢板加工该零件,下列说法中不合理的是( )
A . 半圆锉或圆锉必不可少,锉削时向前施压,回程不施压
B . 钻孔前应将钢板在平口钳上夹紧,调整好位置后冲眼
C . 划针所划的直线线痕上,可以间隔一段距离进行冲眼
D . 安装锯条时应确保锯齿向前,锯条应松紧得当,不歪斜
|
|
| 5. 单选题 | |
|
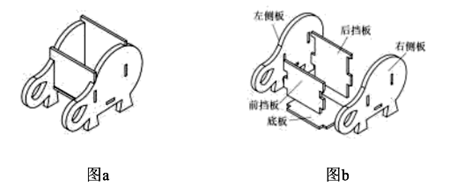
如图a所示是小明设计的木质笔筒,笔筒的零件如图b所示,下列说法中错误的是( )
A . 侧板的加工流程可以为:画线→钻孔→锯割→锉削→砂纸打磨
B . 侧板的加工流程可以为:画线→锯割→凿削→锉削→砂纸打磨
C . 笔筒的组装可以流程为:底板装至左侧板→前后挡板装至左侧板→装右侧板
D . 笔筒的组装流程可以为:底板装至左侧板→右侧板装至底板→装前后挡板
|
|
| 6. 单选题 | |
|
如图a所示是地铁开门系统示意图,图b是底部视角图。电机驱动连杆1转动,通过连杆2、连杆3分别驱动移动门和踏板移动。开门时,下列受力形式分析中正确的是( )
A . 连杆1受弯曲、连杆2受拉、连杆3受压
B . 连杆1受弯曲、连杆2受压、连杆3受拉
C . 连杆1受压、连杆2受拉、连杆3受压
D . 连杆1受压、连杆2受压、连杆3受拉
|
|

| 7. 单选题 | |
|
如图所示是一款写字机器人示意图。其工作过程是:在电脑软件上导入需要书写的文字内容和字体,在笔架模组上装上笔,控制模块会控制左右侧步进电机转动,驱动笔架模块相对运动中枢沿着光杆作X、Y轴运动,让笔在纸上书写所需要写的内容。关于该写字机器人控制系统,下列分析中不恰当的是( )
A . 具有书写的功能体现了系统的目的性
B . 长期使用后书写的字体会变形,体现了系统的动态性
C . 步进电机的功率会影响运动中枢的运动效率,体现了系统的相关性
D . 老师、画家等行业可以使用该机器人,体现了系统的环境适应性
|
|

| 8. 单选题 | |
|
如图所示是一款写字机器人示意图。其工作过程是:在电脑软件上导入需要书写的文字内容和字体,在笔架模组上装上笔,控制模块会控制左右侧步进电机转动,驱动笔架模块相对运动中枢沿着光杆作X、Y轴运动,让笔在纸上书写所需要写的内容。下列关于该写字机器人控制系统分析中正确的是( )
A . 该系统属于闭环控制系统
B . 该系统有反馈
C . 输出量是想要书写的字
D . 控制量是步进电动的转速
|
|

| 9. 单选题 | |
|
小明用三极管作控制器,设计制作可设定温度的高温蜂鸣报警电路,下列元器件必须选用的是( )
A . ①②④⑤⑧
B . ②③④⑤⑦
C . ①③④⑥
D . ②③④⑦
|
|

| 10. 单选题 | |
|
如图所示的温度报警电路,Rt为负温度系数热敏电阻,三极管V是硅管。下列分析中正确的是( )
A . 发光二极管LED开始发光时,适当减小R3 , 电压表V1读数明显变大
B . 发光二极管LED最亮时,电压表V2读数最大
C . 发光二极管LED开始发光时,调小R4 , 电流表A读数变大
D . 发光二极管LED开始发光时,温度在一定范围内升高时,发光二极管LED亮度变亮
|
|

高中通用技术 试卷推荐
- 浙江省A9协作体2021届高三通用技术暑假返校联考试卷
- 浙江省诸暨市2021-2022学年高二上学期通用技术期末考试试卷
- 浙江省舟山市2020-2021学年高二上学期通用技术期末检测试卷
- 浙江省诸暨市2021届高三下学期通用技术5月适应性考试卷
- 重庆市普通高中高职2021年分类招生考试通用技术模拟试卷(五)
- 浙江省“七彩阳光”新高考研究联盟2021-2022学年高二上学期通用技术期中联考试卷
- 浙江省2021-2022学年普通高中新教材苏教版(2019)学业水平考试通用技术模拟卷(2)
- 浙江省五校2021-2022学年高三下学期通用技术期中联考试卷
- 浙江省杭州市七县市2021-2022学年高一上学期通用技术期末学业水平测试试卷
- 浙江省七彩阳光新高考研究联盟2020-2021学年高二下学期通用技术期中联考试卷
- 浙江省湖州市2021-2022学年高三上学期通用技术12月选考模拟(二)
- 浙江省2021届高三通用技术选考仿真模拟卷(一)
最近更新



