第四单元 控制及其设计 知识点题库
在2008年北京奥运会比赛场馆中会有各种电子指示牌,这些电子指示牌的正常运行对比赛的顺利有序进行起到积极的作用,请问下列哪项因素不会干扰指示牌的正常工作( )。
A . 球迷呐喊
B . 高温
C . 暴雨
D . 停电
如图所示为纸浆浓度控制系统工作原理示意图,其工作原理是:控制器将传感器检测到的配浆浓度与设定值相比较,根据偏差值控制电动调节阀调节清水流量,从而使配浆浓度达到设定值。请回答问题。

-
(1) 该控制系统的传感器应该选用( )A . 浓度传感器 B . 流量传感器 C . 压力传感器 D . 温度传感器
-
(2) 该控制系统的输入量及输出量分别是( )A . 清水流量;配浆流量 B . 原浆浓度;配浆浓度 C . 纸浆浓度的设定值;实际配浆浓度 D . 取样检测浓度;配浆浓度设定值
下面控制系统中,属于开环控制的有:( )
①电冰箱温度控制系统,②电风扇机械定时开关控制系统,③红绿灯定时控制系统,④抽水马桶水箱的自动控制系统,⑤红外线自动门控制,⑥电饭锅保温控制系统
A . 1个
B . 2个
C . 3个
D . 4个
高速公路电子收费系统(ETC)涉及了无线电通信、计算机、自动控制等多个知识领域。装有 ETC 终 端的车辆在高速路入口驶入ETC车道时,系统通过 ETC 接收设备对车辆身份进行识别,识别成功后,电动栏杆自动抬起,车辆即可通行。关于这个控制过程说法正确的是( )
A . 控制系统中的输入量是车速
B . 电动栏杆是控制系统中的被控对象
C . ETC 终端是控制系统的控制器
D . 控制系统中的输出量是车辆通行
某供水系统,当管网水压发生变化时,变化的信息通过微机处理,使变频器的输出频率发生变化,进而改变水泵电机的转速,使管网水压自动接近需要的水压。下列关于该供水控制系统的说法中不正确的是( )
A . 变频器出现故障,会引起水泵电机工作不正常,体现了系统的相关性
B . 管网水压自动稳定在需要的水压值,体现了系统的目的性
C . 该系统没有检测装置,控制方式是开环控制
D . 用户用水量变化是该控制系统的干扰因素
我们把银行、宾馆的自动门说成是开环控制,其原因是:( )
A . 它的主要设置是检测到人员以后会打开,才叫做“开”环控制
B . 打开动作后的控制过程不再需要检测装置来参与控制过程
C . 功能单一的控制系统叫开环控制
D . 价格便宜的控制系统叫开环控制
如图所示是高速动车系统,内有烟雾预警控制系统。其工作原理是:烟雾传感器将检测到的烟雾信号送入中心控制器,与设定值进行比较,当高于设定值时,继电器通电,喇叭产生蜂鸣声;同时向制动器发出指令,动车组紧急制动而减速。关于该烟雾预警控制系统,下列说法不正确的是( )

A . 该控制系统的执行器是继电器
B . 烟雾传感器是检测装置,检测的是输入量
C . 该控制系统是开环控制系统
D . 乘客在车厢内抽烟属于该控制系统的干扰因素
如图所示是一款新型血糖控制仪,它能够很好地模拟正常人胰腺分泌胰岛素的动态调节功能,皮下探针实时检测出人体血糖并反馈给血糖控制仪,若超过正常血糖范围,血糖控制仪控制胰岛素泵的胰岛素供给速度,直到把人体实时血糖值维持在正常指标范围内。

-
(1) 从系统角度分析,下列说法不正确的是( )A . 该血糖控制仪能够实时监测调节血糖,体现系统的目的性 B . 探针的灵敏度是影响系统优化的因素 C . 胰岛素泵的可靠工作是系统作用的关键,体现了系统的整体性
 D . 通过血糖控制仪能将人体实时血糖值维持在正常指标范围内,体现系统的动态性
D . 通过血糖控制仪能将人体实时血糖值维持在正常指标范围内,体现系统的动态性
-
(2) 从控制角度分析,下列说法正确的是( )A . 输入量是人体血糖值 B . 进餐后血糖升高是系统的干扰因素 C . 被控对象是胰岛素泵 D . 该系统是开环控制系统
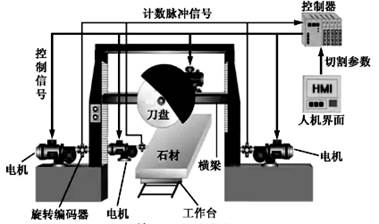
如图所示是石材切割机工作原理图。通过人机界面将石材的切割参数输入控制器,控制器通过继电器控制各个电机工作,工作台将石材移至设定位置,横梁下降,刀盘旋转并沿着横梁进给,完成切割。电机上的旋转编码器将电机的旋转量转换为计数脉冲信号,送入控制器中进行运算,控制器获得各个方向的间接位移量,并与设定值比较,当达到设定值时控制器控制相应的电机停止转动。请根据图及其描述,完成问题。
-
(1) 从系统角度分析,下列分析中不正确的是( )A . 切割机由驱动控制子系统、传动子系统、支撑子系统等组成 B . 任何一个电机损坏,都会影响切割机的工作,体现了系统的动态性 C . 设计时建立数学模型,将切割参数转化为控制参数,体现了系统分析的科学性原则 D . 在移动部件上安装位移传感器获得实际位移量,有利于提高控制精度
-
(2) 该切割机的电机驱动控制系统中的被控对象是( )A . 电机 B . 刀盘 C . 横梁 D . 石材
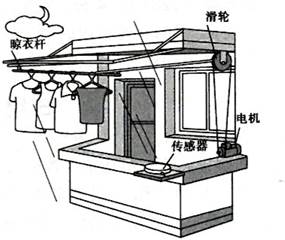
如图所示是一款可伸缩的防雨晾衣装置示意图。晾衣时按动开关,电机带动滑轮转动,将晾衣杆连同衣物移到室外,下雨时,传感器检测到信号后,电机带动滑轮反向转动,将晾衣杆和衣物收回室内。请根据示意图和描述,完成以下任务:
-
(1) 该装置防雨控制的手段属于(在①手动控制;②自动控制中选择合适的选项,将序号填写在横线处);
-
(2) 该系统中的传感器可选用(在①热敏传感器;②光敏传感器;③湿敏传感器中选择合适的选项,将序号填写在横线处);
-
(3) 该系统的执行器是(在①晾衣杆;②电机;③开关中选择合适的选项,将序号填写在横线处)。
-
(4) 为了实现傍晚时能将衣物收回室内,对该系统优化的有效措施是(在“①提高传感器的灵敏度;②增加温度检测及对应的控制子系统;③增加光线检测及对应的控制子系统;④增加定时控制子系统”中选择合适的选项,将序号填写在横线处);
-
(5) 下列因素中,不属于影响本系统优化的因素是(在“①传感器的灵敏度;②控制系统的精度和可靠性;③系统的制造和使用成本;④环境温度、湿度和光线的变化”中选择合适的选项,将序号填写在横线处)
电子警察是现代道路交通安全管理的有效手段,计算机根据雷达探测到的汽车位置变化信号,计算出汽车的行驶速度并判断是否超速,如果超速则启动照相机抓拍,并将拍摄到的图像信息输送到监控中心。请根据上述说明,完成以下任务:
-
(1) 该控制系统的控制方式属于控制(在①开环;②闭环中选择一项,将序号填在横线处);
-
(2) 该控制系统的控制手段属于(在①手动控制;②自动控制中选择一项,将序号填在横线处);
-
(3) 该控制系统的输出量是(在①汽车的行驶速度;②超速车辆的图象;③雷达信号中选择一项,将序号填写在横线处);
-
(4) 为了实时监测汽车行驶速度,应用雷达技术探测汽车的位置变化信号,通过数学模型计算出汽车的行驶速度,判断是否超速.这体现了系统分析的原则(在①整体性;②科学性;③综合性中选择一项,将序号填写在横线处);
-
(5) 照相机对超速车辆抓拍时会受到各种干扰,以下因素中不属于干扰因素的是(在①雨雾;②沙尘;③车辆速度中选择一项,将序号填写在横线处)。
如图所示的浙江某设计团队开发的全自动面条机,面粉、调料、水等原材料按一定比例放入料斗,当料斗中的原材料重量达到重量的设定值上限时,电机开始转动,面条机自动和面并制成面条;当料斗中的原材料被清空后,需要人工切断电源,电机停止转动。面条机由传感器、控制面板、控制器主机、电机、搅拌器、模头等组成。

-
(1) 以下关于该系统的说法中不正确的是( )A . 电机的损坏,会导致系统无法正常运行,体现了系统的整体性 B . 市电电压不稳定时,面条机也能正常工作,说明该系统的环境适应性较强 C . 设计时,考虑搅拌器的功率,同时还要考虑电机的型号,体现了系统分析的整体性原则 D . 设计人员对该面条机的能耗过大进行优化,电机功率是该系统优化的影响因素
-
(2) 下列关于该控制系统的说法中正确的是( )A . 该控制系统有检测装置,所以是闭环控制系统 B . 该控制系统的输入量是设定的原材料的重量 C . 控制器发出的控制信号称为控制量 D . 闭环控制系统必然有检测装置
如图所示为一款四旋翼无人机及其控制示意图。四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的转速实现。当无人机处于悬停控制模式时,能根据设定值在空中保持静止。下列关于无人机悬停控制系统的说法中不合理的是( )

A . 该控制系统属于闭环控制系统
B . 该控制系统的被控量是无人机
C . 空中气流变化属于干扰因素
D . 该控制系统的控制手段是自动控制
反思总结“控制与设计”这一主题的学习过程,思考并完成下列任务:
-
(1) 解释“控制的含义及开环控制与闭环控制的含义”。
-
(2) 联系生活中的实例,简要说明“控制的含义及开环控制与闭环控制的含义”给自己的启示与帮助。
如图所示是一款智能电梯控制系统,它由电梯轿厢、控制器、读卡器及控制电机等组成,根据IC卡上的信息,在刷卡同时控制电梯达到设定的楼层。下列关于该系统的说法正确的是( )

A . 智能电梯控制系统有检测装置,所以该控制系统属于闭环控制系统。
B . 需要手动刷卡,所以该控制系统为人工控制。
C . 该控制系统的控制量是控制器给电机的指令。
D . IC卡的外观相似,如拿错IC卡,将不能到达指定楼层,所以IC卡信息为该控制系 统的输入量。
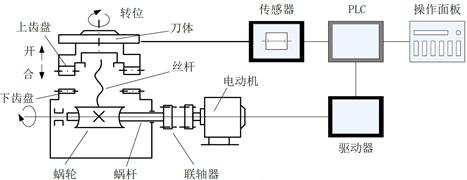
如图所示是数控车床电动刀架控制系统,工作人员通过操作面板输入刀体位置与控制程序,PLC控制模块根据控制信息与传感器检测到的刀体位置信号使驱动器发出相应的驱动信号驱动电机转动,从而带动蜗杆、蜗轮与丝杆运动,最终使刀体移动到设定位置。下列关于数控车床电动刀架控制系统的分析中正确是( )
A . 控制量是刀体的实际位置
B . 控制器是电机
C . 被控对象是刀体
D . 该控制方式是开环控制
豆腐年糕美味,风靡浙江。但小明看到爷爷拿重锤搡年糕(如图a)很不方便且非常辛苦,于是小明想利用现有的一木制台面等(如图b)改造成电动搡年糕装置,其中重锤杆的连接孔尺寸如图c所示。请你帮助小明设计该装置,设计要求如下:

①通过小型电机的驱动,实现重锤以一定频率敲打年糕;
②装置稳固的安装在木制台面上;
③材料自选。.
请完成以下任务:
-
(1) 小明发现该问题的途径是(在“A .观察日常生活:B .收集与分析信息:C .技术试验与技术研究”中选择合适的选项,把序号填入横线上);
-
(2) 设计该装置时,下列信息中可以不考虑的是(在“A .木制台面的承重能力;B .锤杆的截面形状;C .年糕桶的直径”中选择合适的选项,把序号填入横线上)。
-
(3) ①画出机械部分的设计草图(电机可用方块代表),必要时可用文字说明;
②在设计草图上标注主要尺寸;
-
(4) 小明设想该装置安装后可设定电机工作时间,达到一定时间自动停止工作,按照小明的设想该装置的控制方式属于(在“A .开环控制:B .闭环控制”中选择合适的选项,把序号填入横线上)。
下图是声控灯系统组成示意图,根据你的理解和认识回答下列问题。
![]()
-
(1) 该控制系统是开环控制系统还是闭环控制系统?
-
(2) 该控制系统中的被控对象、输出量、控制量和执行器分别是什么?
随着社会安全防范意识的加强,自动跟踪监控摄像头运用得越来越广泛。它可以智能的探测、跟踪监控目标人物,实现对运动人物的自动跟踪、录像、报警。自动跟踪系统是由摄像头实时监控设定区域,将图像持续上传到智能模块,智能模块对图像进行差分计算,自动识别视觉范围内人物运动的方向,并自动控制动力机构带动精密传动装置,使云台移向目标人物方向。从而对移动人物进行追踪,直到人物移出设定区域。

-
(1) 该系统中自动跟踪系统的控制手段和控制方式分别属于和(在①手动控制;②自动控制;③开环控制;④闭环控制中选择合适的选项,将序号填写在横线处)
-
(2) 该系统中自动跟踪系统的执行器和被控对象是和。(在①移动人物:②动力机构;③云台;④智能模块中选择合适的选项,将序号填写在横线处);
-
(3) 下列四个因素中,不属于该控制系统干扰因素的是(在①遮挡摄像头的树叶;②被风吹动的物体:③输入电压不足;④移出设定区域的目标人物中选抒合适的选项,将序号填写在横线处);
-
(4) 自动跟踪监控摄像系统会检测智能模块所处的温度和湿度,自动启动内部加热和降温设备,这是从系统的考虑(在①目的性;②整体性;③相关性;④环境适应性;⑤动态性中选抒合适的选项,将序号填写在横线处)。
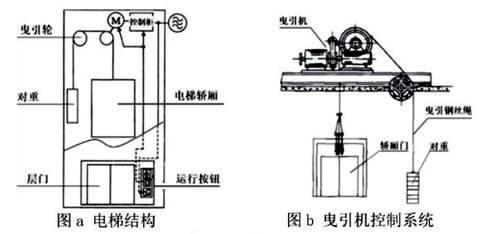
如图a所示是简易电梯结构图,曳引机、控制柜、限速器、轿箱门机、安全钳共同构成电梯控制系统合称电梯五大件。请根据图片及其描述完成以下任务:
-
(1) 要求控制器能够控制轿厢缓慢升降,考虑了的因素(在“A .人;B .物;C .环境;”中选择合适的选项,将序号填入横线处) ;
-
(2) 当电梯在运行中无论何种原因使轿厢发生超速,甚至发生坠落的危险,而所有其他安全保护装置不起作用的情况下,限速器和安全钳迅速联动,使电梯轿厢停住,以上不能体现电梯安全子系统的特性(在“A .目的性; B .相关性;C .环境适应性;D .动态性”中选择合适的选项,将序号填入横线处) ;
-
(3) 关于电梯轿厢门机子系统,从安全角度考虑,下列分析中不正确的是 (在下列选项中选择合适的选项,将序号填入横线处);A . 当层门或轿厢门没有关闭时,操作运行按钮,电梯应不能运行 B . 电梯运行时,打开层门或轿厢门,电梯应立即减速运行 C . 当轿厢不在本层,开启的层门在外力消失后应自行关闭
-
(4) 电梯测试中需对电梯层门进行机械强度试验:层门处于关闭状态,沿门开启方向,通过测力装置施加150N 的力在一个最不利点上,检查门扇与门扇间的缝隙。下列测试点位置合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A .
 B .
B .  C .
C .  D .
D . 
-
(5) 如图b所示为曳引机控制系统,作为电梯的动力设备,其工作过程为:当电梯内、外的人按动运行按钮,控制器驱动曳引机卷动曳引钢丝绳,调节轿厢和对重的平衡,实现轿厢与对重的升降运动。下列属于该曳引控制系统干扰因素的是 (在“A .按动运行按钮;B .轿厢和对重升降状态的改变;C .曳引轮槽磨损”中选择合适的选项,将序号填入横线处) ;
-
(6) 为了测试曳引机的平衡系数,在轿厢空载和额定载重量的25%、40%、 50%、75%、100%、110%时作上、下运行,当轿厢与对重运行到同一水平位置时,记录曳引机电流、电压及转速的数值。该试验方法属于(在“A .优选试验法;B .模拟试验法;C .虚拟试验法;D .强化试验法”中选择合适的选项,将序号填入横线处)。
最近更新



