дёҖ жҺ§еҲ¶зҡ„ж–№ејҸдёҺеә”з”Ё зҹҘиҜҶзӮ№йўҳеә“
д»ҘдёӢиҜҙжі•жӯЈзЎ®зҡ„жҳҜпјҲ пјү
A . иҜҘзі»з»ҹжҳҜејҖзҺҜжҺ§еҲ¶зі»з»ҹ
B . иҜҘзі»з»ҹжҳҜй—ӯзҺҜжҺ§еҲ¶зі»з»ҹ
C . иҜҘзі»з»ҹйҮҮз”Ёдәәе·ҘжҺ§еҲ¶зҡ„ж–№ејҸ
D . иҜҘзі»з»ҹйҮҮз”Ёз”өеӯҗжҺ§еҲ¶зҡ„ж–№ејҸ
еҰӮеӣҫжүҖзӨәдёәжҹҗе°ҸеҢәиҪҰиҫҶ收иҙ№зі»з»ҹи®ҫи®ЎеӣҫпјҢеҪ“е…ҘеҸЈеӨ„еҮҸйҖҹеёҰйҷ„иҝ‘зҡ„ең°ж„ҹзәҝеңҲжЈҖжөӢеҲ°жұҪиҪҰиҝӣе…Ҙж—¶пјҢж‘„еғҸеӨҙжӢҚж‘„жұҪиҪҰзүҢз…§пјҢйҖҡиҝҮз”өи„‘иҜҶеҲ«иҪҰзүҢгҖҒи®°еҪ•иҝӣе…Ҙж—¶й—ҙпјҢ并жҠ¬иө·йҒ“й—ёж”ҫиЎҢпјҢжЈҖжөӢеҲ°иҪҰйҖҡиҝҮеҗҺж”ҫдёӢйҒ“й—ёпјӣеҪ“еҮәеҸЈеҮҸйҖҹеёҰеӨ„зҡ„ең°ж„ҹзәҝеңҲжЈҖжөӢеҲ°жұҪиҪҰзҰ»ејҖж—¶пјҢеҶҚж¬ЎиҜҶеҲ«жұҪиҪҰзүҢз…§пјҢ并计算еҮәиҪҰиҫҶеңЁе°ҸеҢәзҡ„еҒңз•ҷж—¶й—ҙпјҢеҗҢж—¶жҠҠеҒңиҪҰиҙ№зӯүдҝЎжҒҜжҳҫзӨәеңЁеұҸ幕дёҠгҖӮиҜ·еӣһзӯ”дёӢеҲ—й—®йўҳпјҡ

-
пјҲ1пјү иҪҰиҫҶ收иҙ№зі»з»ҹзҡ„жҺ§еҲ¶жүӢж®өе’ҢжҺ§еҲ¶ж–№ејҸеҲҶеҲ«дёәе’ҢпјҲеңЁвҖңA . дәәе·ҘжҺ§еҲ¶пјӣB . иҮӘеҠЁжҺ§еҲ¶пјӣC .ејҖзҺҜжҺ§еҲ¶пјӣD . й—ӯзҺҜжҺ§еҲ¶вҖқдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶйҖүйЎ№еЎ«еңЁжЁӘзәҝеӨ„пјүпјӣ
-
пјҲ2пјү иҜҘзі»з»ҹзҡ„жҺ§еҲ¶еҷЁе’Ңиў«жҺ§еҜ№иұЎеҲҶеҲ«дёәе’ҢпјҲеңЁвҖңA . з”өи„‘пјӣB . ж‘„еғҸеӨҙпјӣC . жҳҫзӨәеұҸпјӣD .жұҪиҪҰвҖқдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶйҖүйЎ№еЎ«еңЁжЁӘзәҝеӨ„пјүпјӣ
-
пјҲ3пјү дёӢеҲ—йҖүйЎ№дёӯеұһдәҺиҪҰиҫҶ收иҙ№зі»з»ҹе№Іжү°еӣ зҙ зҡ„жңүе’ҢпјҲеңЁвҖңA . иҪҰиҫҶиҝӣеҮәж—¶й—ҙпјӣB . йӣЁгҖҒйӣҫзӯүжҒ¶еҠЈеӨ©ж°”пјӣC . еҮәе…ҘеҸЈз”өи„‘д№Ӣй—ҙзҡ„йҖҡи®Ҝж•…йҡңвҖқдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶйҖүйЎ№еЎ«еңЁжЁӘзәҝеӨ„пјүгҖӮ
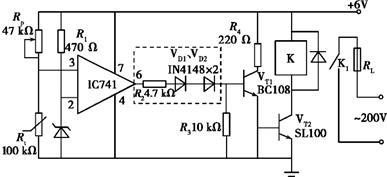
дёӢеӣҫжүҖзӨәз”өи·ҜжҳҜз”өзғӯж°ҙеҷЁжё©еәҰжҺ§еҲ¶еҷЁз”өи·ҜгҖӮз”өи·Ҝдё»иҰҒз”ұзғӯж•Ҹз”өйҳ»RtгҖҒжҜ”иҫғеҷЁгҖҒй©ұеҠЁз”өи·ҜеҸҠеҠ зғӯеҷЁRLзӯүз»„жҲҗгҖӮйҖҡиҝҮз”өи·ҜеҸҜиҮӘеҠЁжҺ§еҲ¶еҠ зғӯеҷЁзҡ„ејҖй—ӯпјҢдҪҝж°ҙжё©дҝқжҢҒеңЁ90 в„ғгҖӮзғӯж•Ҹз”өйҳ»еңЁ25 в„ғж—¶зҡ„йҳ»еҖјдёә100 kО©пјҢжё©еәҰзі»ж•°дёә1 K/в„ғгҖӮеңЁжҜ”иҫғеҷЁIC741зҡ„еҸҚеҗ‘иҫ“е…Ҙз«Ҝ(2и„ҡ)еҠ жңү3.9 Vзҡ„еҹәеҮҶз”өеҺӢпјҢеңЁжҜ”иҫғеҷЁзҡ„еҗҢеҗ‘иҫ“е…Ҙз«Ҝ(3и„ҡ)еҠ жңүRpе’Ңзғӯж•Ҹз”өйҳ»Rtзҡ„еҲҶеҺӢз”өеҺӢгҖӮеҪ“ж°ҙжё©дҪҺдәҺ90 в„ғж—¶пјҢжҜ”иҫғеҷЁиҫ“еҮәз«Ҝ(6и„ҡ)иҫ“еҮәй«ҳз”өдҪҚпјҢй©ұеҠЁVT1е’ҢVT2еҜјйҖҡпјҢдҪҝ继з”өеҷЁKе·ҘдҪңпјҢK1еҗёеҗҲжҺҘйҖҡеҠ зғӯеҷЁз”өи·ҜпјӣеҪ“ж°ҙжё©й«ҳдәҺ90 в„ғж—¶пјҢжҜ”иҫғеҷЁиҫ“еҮәз«ҜеҸҳдёәдҪҺз”өдҪҚпјҢVT1е’ҢVT2жҲӘжӯўпјҢ继з”өеҷЁKеҲҷж–ӯејҖеҠ зғӯеҷЁз”өи·ҜгҖӮ
-
пјҲ1пјү иҜҘз”өзғӯж°ҙеҷЁжё©еәҰжҺ§еҲ¶еҷЁзҡ„жҺ§еҲ¶ж–№ејҸжҳҜ(еңЁв‘ ејҖзҺҜжҺ§еҲ¶пјӣв‘Ўй—ӯзҺҜжҺ§еҲ¶дёӯйҖүжӢ©дёҖйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁжЁӘзәҝеӨ„)пјӣ
-
пјҲ2пјү еҪ“ж°ҙжё©еҸҳй«ҳж—¶пјҢзғӯж•Ҹз”өйҳ»Rtзҡ„йҳ»еҖј(еңЁв‘ еўһеӨ§пјӣв‘ЎеҮҸе°Ҹпјӣв‘ўдёҚеҸҳдёӯйҖүжӢ©дёҖйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁжЁӘзәҝеӨ„)пјӣ
-
пјҲ3пјү иӢҘжғіжҠҠжҺ§еҲ¶ж°ҙжё©и°ғж•ҙеҲ°85в„ғпјҢеҲҷеҸҜд»ҘRpзҡ„йҳ»еҖј(еңЁв‘ еўһеӨ§пјӣв‘ЎеҮҸе°ҸдёӯйҖүжӢ©дёҖйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁжЁӘзәҝеӨ„)пјӣ
-
пјҲ4пјү жң¬з”өи·Ҝд№ҹеҸҜж”№жҲҗеҲ¶еҶ·жё©еәҰжҺ§еҲ¶пјҢйҖҡиҝҮж”№еҸҳжҜ”иҫғеҷЁIC741зҡ„еҸҚеҗ‘иҫ“е…Ҙз«Ҝ(3и„ҡ)зҡ„еҹәеҮҶз”өеҺӢжқҘи®ҫе®ҡдёҖдёӘиҫғдҪҺзҡ„жё©еәҰ(еҰӮ1в„ғ)пјҢ继з”өеҷЁKж–ӯејҖжҲ–й—ӯеҗҲзҡ„жҳҜеҲ¶еҶ·з”ЁеҺӢзј©жңәзҡ„з”өи·ҜпјҢеҪ“жё©еәҰй«ҳдәҺ1в„ғж—¶иҰҒжұӮжҺҘйҖҡеҺӢзј©жңәз”өи·ҜдҪҝд№ӢејҖе§ӢеҲ¶еҶ·пјҢжӯӨж—¶йңҖиҰҒеҜ№иҷҡзәҝжЎҶйғЁеҲҶеҠ е…ҘдёҖдёӘйҖ»иҫ‘й—Ёз”өи·ҜпјҢиҜ·еңЁдёӢиҫ№зәҝжЎҶеҶ…з”»еҮәдҝ®ж”№еҗҺзҡ„з”өи·ҜгҖӮ
дёҖдёӘжҠҪеұүзҒҜе…үжҺ§еҲ¶зі»з»ҹпјҢе…·жңүдёӨдёӘеӯҗзі»з»ҹз»„жҲҗгҖӮжҠҪеұүејҖе…іеӯҗзі»з»ҹзҡ„еҠҹиғҪпјҡеҪ“дј ж„ҹеҷЁ1жЈҖжөӢеҲ°жҠҪеұүжү“ејҖдҝЎеҸ·еҗҺпјҢз”өеӯҗиҠҜзүҮдёӢиҫҫе‘Ҫд»Өз»ҷз”өеӯҗејҖе…іпјҢеҗҜеҠЁдә®еәҰжҺ§еҲ¶еӯҗзі»з»ҹпјӣжҠҪеұүжү“ејҖеҗҺпјҢдј ж„ҹеҷЁ2жЈҖжөӢеҲ°еӨ–з•Ңдә®еәҰдҪҺдәҺи®ҫе®ҡдә®еәҰж—¶пјҢз”өеӯҗиҠҜзүҮи°ғиҠӮеҸҜи°ғз”өйҳ»зҡ„йҳ»еҖјпјҢж”№еҸҳledзҒҜзҡ„дә®еәҰпјҢиҝӣиҖҢдҪҝжҠҪеұүеҶ…зҡ„дә®еәҰз»ҙжҢҒеңЁи®ҫе®ҡдә®еәҰйҷ„иҝ‘гҖӮдёӢеҲ—иҜҙжі•дёӯжӯЈзЎ®зҡ„жҳҜпјҲ пјү

A . жҠҪеұүејҖе…іеӯҗзі»з»ҹе’Ңдә®еәҰжҺ§еҲ¶еӯҗзі»з»ҹйғҪеұһдәҺејҖзҺҜжҺ§еҲ¶зі»з»ҹ
B . ledзҒҜзҡ„дә®еәҰжҳҜдә®еәҰжҺ§еҲ¶еӯҗзі»з»ҹзҡ„иў«жҺ§йҮҸ
C . дә®еәҰжҺ§еҲ¶еӯҗзі»з»ҹзҡ„жү§иЎҢеҷЁжҳҜеҸҜи°ғз”өйҳ»е’ҢledзҒҜ
D . з”өеӯҗејҖе…іжҳҜжҠҪеұүејҖе…іеӯҗзі»з»ҹзҡ„иў«жҺ§еҜ№иұЎ
еҰӮеӣҫжүҖзӨәжҳҜдёҖж¬ҫеҸҜи°ғжҒ’жё©жҡ–еҘ¶еҷЁпјҢеҸҜд»ҘдҪҝйҮҢйқўеҘ¶ж°ҙдҝқжҢҒеңЁйҖӮеҗҲзҡ„жё©еәҰпјҢеҪ“жё©еәҰејӮеёёж—¶дјҡеҸ‘еҮәиӯҰжҠҘгҖӮд»ҘдёӢе…ідәҺжҒ’жё©жҡ–еҘ¶еҷЁиҜҙжі•жӯЈзЎ®зҡ„жҳҜпјҲ пјү

A . жё©еәҰжҺ§еҲ¶еӯҗзі»з»ҹиў«жҺ§еҜ№иұЎжҳҜеҘ¶ж°ҙжё©еәҰзҡ„й«ҳдҪҺ
B . и®ҫе®ҡжё©еәҰдёҠйҷҗеҸҠдёӢйҷҗжҳҜжҺ§еҲ¶зі»з»ҹзҡ„иҫ“е…ҘйҮҸ
C . жё©еәҰжҺ§еҲ¶еӯҗзі»з»ҹеҸҠжҠҘиӯҰеӯҗзі»з»ҹеқҮеӯҳеңЁжЈҖжөӢзҺҜиҠӮпјҢйғҪжҳҜй—ӯзҺҜжҺ§еҲ¶
D . жё©еәҰжҺ§еҲ¶еӯҗзі»з»ҹжҚҹеқҸпјҢеҲҷжҠҘиӯҰеӯҗзі»з»ҹе°ұдјҡеҒңжӯўе·ҘдҪң
еҰӮеӣҫжүҖзӨәзҡ„жөҷжұҹжҹҗи®ҫи®ЎеӣўйҳҹејҖеҸ‘зҡ„е…ЁиҮӘеҠЁйқўжқЎжңәпјҢйқўзІүгҖҒи°ғж–ҷгҖҒж°ҙзӯүеҺҹжқҗж–ҷжҢүдёҖе®ҡжҜ”дҫӢж”ҫе…Ҙж–ҷж–—пјҢеҪ“ж–ҷж–—дёӯзҡ„еҺҹжқҗж–ҷйҮҚйҮҸиҫҫеҲ°йҮҚйҮҸзҡ„и®ҫе®ҡеҖјдёҠйҷҗж—¶пјҢз”өжңәејҖе§ӢиҪ¬еҠЁпјҢйқўжқЎжңәиҮӘеҠЁе’Ңйқўе№¶еҲ¶жҲҗйқўжқЎпјӣеҪ“ж–ҷж–—дёӯзҡ„еҺҹжқҗж–ҷиў«жё…з©әеҗҺпјҢйңҖиҰҒдәәе·ҘеҲҮж–ӯз”өжәҗпјҢз”өжңәеҒңжӯўиҪ¬еҠЁгҖӮйқўжқЎжңәз”ұдј ж„ҹеҷЁгҖҒжҺ§еҲ¶йқўжқҝгҖҒжҺ§еҲ¶еҷЁдё»жңәгҖҒз”өжңәгҖҒжҗ…жӢҢеҷЁгҖҒжЁЎеӨҙзӯүз»„жҲҗгҖӮ

-
пјҲ1пјү д»ҘдёӢе…ідәҺиҜҘзі»з»ҹзҡ„иҜҙжі•дёӯдёҚжӯЈзЎ®зҡ„жҳҜпјҲ пјүA . з”өжңәзҡ„жҚҹеқҸпјҢдјҡеҜјиҮҙзі»з»ҹж— жі•жӯЈеёёиҝҗиЎҢпјҢдҪ“зҺ°дәҶзі»з»ҹзҡ„ж•ҙдҪ“жҖ§ B . еёӮз”өз”өеҺӢдёҚзЁіе®ҡж—¶пјҢйқўжқЎжңәд№ҹиғҪжӯЈеёёе·ҘдҪңпјҢиҜҙжҳҺиҜҘзі»з»ҹзҡ„зҺҜеўғйҖӮеә”жҖ§иҫғејә C . и®ҫи®Ўж—¶пјҢиҖғиҷ‘жҗ…жӢҢеҷЁзҡ„еҠҹзҺҮпјҢеҗҢж—¶иҝҳиҰҒиҖғиҷ‘з”өжңәзҡ„еһӢеҸ·пјҢдҪ“зҺ°дәҶзі»з»ҹеҲҶжһҗзҡ„ж•ҙдҪ“жҖ§еҺҹеҲҷ D . и®ҫи®Ўдәәе‘ҳеҜ№иҜҘйқўжқЎжңәзҡ„иғҪиҖ—иҝҮеӨ§иҝӣиЎҢдјҳеҢ–пјҢз”өжңәеҠҹзҺҮжҳҜиҜҘзі»з»ҹдјҳеҢ–зҡ„еҪұе“Қеӣ зҙ
-
пјҲ2пјү дёӢеҲ—е…ідәҺиҜҘжҺ§еҲ¶зі»з»ҹзҡ„иҜҙжі•дёӯжӯЈзЎ®зҡ„жҳҜпјҲ пјүA . иҜҘжҺ§еҲ¶зі»з»ҹжңүжЈҖжөӢиЈ…зҪ®пјҢжүҖд»ҘжҳҜй—ӯзҺҜжҺ§еҲ¶зі»з»ҹ B . иҜҘжҺ§еҲ¶зі»з»ҹзҡ„иҫ“е…ҘйҮҸжҳҜи®ҫе®ҡзҡ„еҺҹжқҗж–ҷзҡ„йҮҚйҮҸ C . жҺ§еҲ¶еҷЁеҸ‘еҮәзҡ„жҺ§еҲ¶дҝЎеҸ·з§°дёәжҺ§еҲ¶йҮҸ D . й—ӯзҺҜжҺ§еҲ¶зі»з»ҹеҝ…然жңүжЈҖжөӢиЈ…зҪ®
еҰӮеӣҫжүҖзӨәзҡ„з”өеӯҗжҷәиғҪд№үиӮўпјҢжҳҜзҫҺеӣҪйЈҹе“ҒиҚҜе“Ғзӣ‘зқЈз®ЎзҗҶеұҖе·ІжӯЈејҸжү№еҮҶзҡ„DEKAжүӢиҮӮзі»з»ҹеҢ»з–—еҷЁжў°пјҢеҸҜд»ҘжҺҘ收жӮЈиҖ…ж®ӢиӮўеӨ„иӮҢиӮү收缩зҡ„з”өжҙ»еҠЁдҝЎеҸ·пјҢ并е°Ҷиҝҷдәӣз”өдҝЎеҸ·дј иҫ“еҲ°еҒҮиӮўдёӯзҡ„и®Ўз®—жңәеӨ„зҗҶеҷЁдјҡе°ҶдҝЎеҸ·иҪ¬еҢ–дёәиӮўдҪ“жҙ»еҠЁгҖӮе…ідәҺиҜҘз”өеӯҗжҷәиғҪд№үиӮўжҺ§еҲ¶зі»з»ҹпјҢдёӢеҲ—иҜҙжі•жӯЈзЎ®зҡ„жҳҜ ( )

A . жҺ§еҲ¶еҷЁжҳҜдәәзҡ„еӨ§и„‘
B . иҜҘжҺ§еҲ¶зі»з»ҹжІЎжңүжү§иЎҢеҷЁ
C . иҜҘжҺ§еҲ¶зі»з»ҹжІЎжңүжЈҖжөӢиЈ…зҪ®
D . иҜҘжҺ§еҲ¶зі»з»ҹжҳҜејҖзҺҜжҺ§еҲ¶
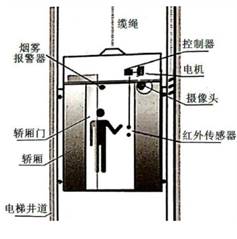
еҰӮеӣҫжүҖзӨәжҳҜдёҖж¬ҫе® зү©еҢ»йҷўдё“з”ЁжүӢжңҜеҸ°гҖӮйҮҮз”ЁдәҶеҫ®з”өи„‘жҺ§еҲ¶пјҢе…Ҳиҝӣзҡ„з”өеҠЁж¶ІеҺӢдј еҠЁжҠҖжңҜпјҢжӣҝд»ЈдәҶдј з»ҹзҡ„з”өеҠЁжҺЁжқҶдј еҠЁжҠҖжңҜпјҢдә§е“Ғз»“жһ„зӢ¬зү№пјҢж“ҚдҪңз®ҖеҚ•пјҢе®үе…ЁеҸҜйқ гҖӮ

ж №жҚ®жҸҸиҝ°еҸҠеӣҫзӨәпјҢе®ҢжҲҗд»ҘдёӢд»»еҠЎпјҡ
-
пјҲ1пјү з”өеӯҗжҳҫзӨәеұҸеҸҜд»Ҙе®һж—¶жҳҫзӨәе·ҘдҪңеҸ°зҡ„жё©еәҰпјҢдё»иҰҒдҪ“зҺ°дәҶдәәжңәе…ізі»дёӯзҡ„(еңЁв‘ е®үе…Ёзӣ®ж Үпјӣв‘ЎдҝЎжҒҜдәӨдә’пјӣв‘ўзү№ж®ҠдәәзҫӨйңҖжұӮпјӣв‘Јй«ҳж•Ҳзӣ®ж ҮдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁдёӢеҲ’зәҝеӨ„)пјӣ
-
пјҲ2пјү еҫ®з”өи„‘жҺ§еҲ¶еҷЁеҸҜд»ҘеҜ№жүӢжңҜеҸ°иҝӣиЎҢжҒ’жё©жҺ§еҲ¶пјҢиҜҘжё©еәҰжҺ§еҲ¶зі»з»ҹзҡ„дј ж„ҹеҷЁеә”йҖүз”Ё(еңЁв‘ дҪҚз§»дј ж„ҹеҷЁпјӣв‘Ўж°ҙдҪҚдј ж„ҹеҷЁпјӣв‘ўжё©еәҰдј ж„ҹеҷЁдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁдёӢеҲ’зәҝеӨ„)пјӣ
-
пјҲ3пјү жүӢжңҜеҸ°зҡ„й«ҳеәҰеҸҜд»ҘйҖҡиҝҮйҒҘжҺ§еҷЁиҫ“е…Ҙзӣёеә”жҢҮд»ӨпјҢжҺ§еҲ¶ж¶ІеҺӢжіөзҡ„дјёзј©жқҘе®ҢжҲҗи°ғиҠӮпјҢиҜҘй«ҳеәҰжҺ§еҲ¶зі»з»ҹзҡ„жҺ§еҲ¶жүӢж®өжҳҜ (еңЁв‘ ејҖзҺҜжҺ§еҲ¶пјӣв‘Ўй—ӯзҺҜжҺ§еҲ¶пјӣв‘ўиҮӘеҠЁжҺ§еҲ¶пјӣв‘Јдәәе·ҘжҺ§еҲ¶дёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁдёӢеҲ’зәҝеӨ„)пјӣ
-
пјҲ4пјү йҮҮз”Ёж©Ўиғ¶еҲ№иҪҰиҪ®еҸҜд»Ҙи®©жүӢжңҜеҸ°еҸҜйқ зҡ„еҒңеңЁжүӢжңҜе®Өзҡ„д»»ж„ҸдҪҚзҪ®пјҢдё»иҰҒиҖғиҷ‘дәҶзҡ„еӣ зҙ (еңЁв‘ дәәпјӣв‘Ўзү©пјӣв‘ўзҺҜеўғдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁдёӢеҲ’зәҝеӨ„)пјӣ
-
пјҲ5пјү дёәдәҶжөӢиҜ•жүӢжңҜеҸ°зҡ„дёҚй”Ҳй’ўзҪ‘еҸ°йқўзҡ„ејәеәҰпјҢе°ҸжҳҺеңЁзҪ‘еҸ°йқўдёҠж”ҫзҪ®иЈ…ж»Ўж°ҙзҡ„зҹҝжіүж°ҙ瓶(500ml/瓶)пјҢи§ӮеҜҹдёҚй”Ҳй’ўзҪ‘еҸ°йқўзҡ„еҪўеҸҳжғ…еҶөпјҢд»–йҮҮз”Ёзҡ„иҜ•йӘҢж–№жі•жҳҜ(еңЁв‘ 移жӨҚиҜ•йӘҢжі•пјӣв‘ЎжЁЎжӢҹиҜ•йӘҢжі•пјӣв‘ўиҷҡжӢҹиҜ•йӘҢжі•дёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁдёӢеҲ’зәҝеӨ„)пјӣ
-
пјҲ6пјү д»Һз»“жһ„зҡ„зЁіе®ҡжҖ§иҖғиҷ‘пјҢдёӢеҲ—ж–№жЎҲдёҚиғҪжңүж•ҲжҸҗй«ҳжүӢжңҜеҸ°йқҷжӯўзҠ¶жҖҒдёӢзЁіе®ҡжҖ§зҡ„жҳҜ (еңЁв‘ йҖӮеҪ“еўһеҠ ж©Ўиғ¶еҲ№иҪҰеңҶиҪ®зҡ„йҮҚйҮҸпјӣв‘ЎйҖӮеҪ“еўһеҠ еңҶиҪ®д№Ӣй—ҙзҡ„й—ҙи·қпјӣв‘ўйҖӮеҪ“еўһеҠ ж”Ҝж’‘жқҶзҡ„еӨ§е°ҸдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«е…ҘдёӢеҲ’зәҝеӨ„)гҖӮ
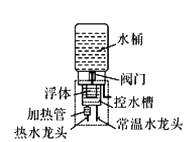
еҰӮеӣҫжүҖзӨәпјҢиҝҷжҳҜж°ҙеЎ”дёӯзҡ„ж°ҙз®ұж°ҙдҪҚжҺ§еҲ¶зі»з»ҹгҖӮжө®зҗғдҪҚзҪ®йҡҸзқҖж°ҙеЎ”ж°ҙдҪҚеҗҢжӯҘеҸҳеҢ–пјҢжө®зҗғзҡ„дҪҚзҪ®еҚідёәе®һйҷ…ж°ҙдҪҚгҖӮеҪ“ж°ҙдҪҚдёӢйҷҚеҲ°еә•йғЁзҡ„й•ҝејҖе№Із°§з®Ўж—¶пјҢзЈҒжҖ§жө®зҗғдҪҝжӯӨеӨ„е№Із°§з®ЎеҠЁдҪңпјҢи§ҰзӮ№й—ӯеҗҲпјҢй©ұеҠЁз»§з”өеҷЁеҠЁдҪңпјҢ继з”өеҷЁй—ӯеҗҲж°ҙжіөз”өи·ҜдҪҝж°ҙжіөе·ҘдҪңжҠҪж°ҙпјҢж°ҙеЎ”ж°ҙдҪҚдёҚж–ӯдёҠеҚҮпјҢеҪ“иҫҫеҲ°дёҠйғЁзҡ„й•ҝй—ӯе№Із°§з®Ўж—¶пјҢзЈҒжҖ§жө®зҗғдҪҝжӯӨеӨ„е№Із°§з®ЎеҠЁдҪңпјҢи§ҰзӮ№ж–ӯејҖпјҢ继з”өеҷЁж–ӯејҖж°ҙжіөз”өи·ҜжҠҪж°ҙз»“жқҹпјҢж°ҙеЎ”ж°ҙдҪҚеҒңжӯўдёҠеҚҮпјҲе№Із°§з®ЎеңЁзЈҒжҖ§дҪңз”ЁдёӢдјҡжү“ејҖжҲ–е…ій—ӯз®ЎеҶ…зҡ„и§ҰзӮ№ејҖе…іпјүгҖӮиҜ·ж №жҚ®зӨәж„Ҹеӣҫе’ҢжҸҸиҝ°пјҢе®ҢжҲҗд»ҘдёӢд»»еҠЎпјҡ

-
пјҲ1пјү иҜҘзі»з»ҹзҡ„жҺ§еҲ¶жүӢж®өе’ҢжҺ§еҲ¶ж–№ејҸеҲҶеҲ«еұһдәҺе’ҢпјҲеңЁв‘ жүӢеҠЁжҺ§еҲ¶пјӣв‘ЎиҮӘеҠЁжҺ§еҲ¶пјӣв‘ўејҖзҺҜжҺ§еҲ¶пјӣв‘Јй—ӯзҺҜжҺ§еҲ¶дёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁжЁӘзәҝеӨ„пјүпјӣ
-
пјҲ2пјү иҜҘзі»з»ҹзҡ„иў«жҺ§еҜ№иұЎжҳҜпјҲеңЁв‘ ж°ҙз®ұпјӣв‘Ўж°ҙжіөпјӣв‘ўжө®зҗғйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«еҶҷеңЁжЁӘзәҝеӨ„пјүпјӣ
-
пјҲ3пјү иӢҘеңЁдҪҝз”ЁиҝҮзЁӢдёӯеҸ‘зҺ°пјҢж°ҙеЎ”еҶ…ж°ҙдҪҚе°ҡжңӘеҲ°иҫҫй«ҳж°ҙдҪҚе°ұеҒңдёӢжқҘпјҢз»ҸиҝҮжЈҖжҹҘжүҖжңүе…ғ件йғҪжҳҜжӯЈеёёзҡ„пјҢд»ҘдёӢеҲҶжһҗеҺҹеӣ пјҢдёҚеҸҜиғҪзҡ„жҳҜгҖӮпјҲе°ҶеәҸеҸ·еЎ«еҶҷеңЁжЁӘзәҝеӨ„пјүпјӣ
в‘ ж°ҙеЎ”еҶ…ж°ҙдҪҚе·®и·қиҫғеӨ§ в‘Ўжө®зҗғзЈҒжҖ§иҝҮејә в‘ўзЈҒжҖ§жө®зҗғзҡ„зЈҒжҖ§ж¶ҲеӨұгҖӮ -
пјҲ4пјү ж°ҙз®ұзҡ„зӣ–еӯҗиў«еӨ§йЈҺеҗ№жҺүпјҢеӨ§еһӢйёҹзұ»йЈһеҲ°жұ дёӯи§…йЈҹжҲҸж°ҙпјҢйҖ жҲҗж°ҙйқўжіўеҠЁпјҢеј•иө·ж°ҙжіөйў‘з№ҒеҗҜеҠЁе’ҢеҒңжӯўпјҢиҝҷз§Қеӣ зҙ иў«з§°дёәгҖӮ
еҰӮеӣҫжүҖзӨәжҳҜи®Ўз®—жңәзЈҒзӣҳеҶ…йғЁз»“жһ„зӨәж„ҸеӣҫпјҢе…¶е·ҘдҪңеҺҹзҗҶжҳҜзЈҒеӨҙжӮ¬жө®еңЁй«ҳйҖҹиҪ¬еҠЁзҡ„зЈҒзӣҳзүҮдёҠпјҢйҖҡиҝҮзЈҒеӨҙеҮҶзЎ®е®ҡдҪҚжқҘиҜ»еҶҷзЈҒзӣҳдёҠзҡ„дҝЎжҒҜгҖӮеҪ“йңҖиҰҒиҜ»еҸ–ж•°жҚ®ж—¶пјҢи®Ўз®—жңәзі»з»ҹеҸ‘йҖҒеҜ№еә”зҡ„зү©зҗҶең°еқҖпјҢзЈҒзӣҳй©ұеҠЁеҷЁиҜ»еҸ–зі»з»ҹзҡ„жҺ§еҲ¶з”өи·ҜжҺҘ收еҲ°зү©зҗҶең°еқҖеҗҺпјҢй©ұеҠЁз”өжңәеёҰеҠЁдј еҠЁжүӢиҮӮзҡ„иҪ¬еҠЁпјҢзЈҒеӨҙе®үиЈ…еңЁдј еҠЁжүӢиҮӮдёҠпјҢзЈҒеӨҙдҪҚзҪ®зҡ„ең°еқҖдҝЎжҒҜдёҺзү©зҗҶең°еқҖжҜ”иҫғеҗҺе®һзҺ°зЈҒеӨҙзІҫеҮҶе®ҡдҪҚпјҢжӯӨж—¶зЈҒеӨҙиҜ»еҸ–иҜҘеӨ„зҡ„зЈҒйҖҡйҮҸпјҢе°Ҷе…¶иҪ¬еҢ–дёәз”өдҝЎеҸ·пјҢе®һзҺ°ж•°жҚ®иҜ»еҸ–гҖӮе…ідәҺзЈҒзӣҳй©ұеҠЁеҷЁиҜ»еҸ–зі»з»ҹзҡ„еҲҶжһҗжӯЈзЎ®зҡ„жҳҜпјҲ пјү

A . дёәжҸҗй«ҳзІҫеәҰпјҢеҸҜд»Ҙи®ҫи®ЎдёәејҖзҺҜжҺ§еҲ¶
B . иҜҘжҺ§еҲ¶зі»з»ҹзҡ„иў«жҺ§еҜ№иұЎдёәзЈҒеӨҙ
C . жҺ§еҲ¶йҮҸжҳҜзЈҒеӨҙзҡ„дҪҚзҪ®
D . еӣәе®ҡзЈҒзӣҳж—¶дёҚйңҖиҰҒиҖғиҷ‘йҳІжҢҜ
еҰӮеӣҫжүҖзӨәжҳҜиҮӘеҠЁй—ЁзӨәж„ҸеӣҫгҖӮеҪ“дәәиө°иҝӣж„ҹеә”еҢәеҹҹж—¶пјҢжЈҖжөӢиЈ…зҪ®жҺўжөӢеҲ°дәәдҪ“дҝЎеҸ·пјҢжҺ§еҲ¶з”өи·ҜжҺҘ收еҲ°иҜҘдҝЎеҸ·еҗҺпјҢеҸ‘еҮәзӣёеә”зҡ„жҢҮд»ӨпјҢеҗҜеҠЁз”өжңәжҠҠй—Ёжү“ејҖгҖӮеҪ“й—ЁејҖеҗҜд№ӢеҗҺпјҢжҺ§еҲ¶з”өи·Ҝе°ҶдҪңеҮәеҲӨж–ӯпјҢеҰӮжһңжІЎжңүдәәеңЁж„ҹеә”еҢәеҹҹеҶ…пјҢе°ұйҖҡзҹҘз”өжңәдҪңеҸҚеҗ‘иҝҗиҪ¬пјҢе°Ҷй—Ёе…ій—ӯгҖӮе…ідәҺиҜҘжҺ§еҲ¶зі»з»ҹпјҢдёӢеҲ—иҜҙжі•дёӯжӯЈзЎ®зҡ„жҳҜпјҲ пјү

A . иҫ“е…ҘйҮҸжҳҜдәәдҪ“дҝЎеҸ·пјҢжүҖд»ҘжҳҜдәәе·ҘжҺ§еҲ¶
B . й—ЁејҖеҗҜд№ӢеҗҺеҸҜд»ҘиҮӘеҠЁе…ій—ӯпјҢеӯҳеңЁеҸҚйҰҲзҺҜиҠӮ
C . иҮӘеҠЁй—Ёзҡ„ејҖеҗҜжҲ–е…ій—ӯдёҺжЈҖжөӢиЈ…зҪ®жҳҜеҗҰжЈҖжөӢеҲ°дәәдҪ“дҝЎеҸ·зӣёеҜ№еә”
D . жңүдәәеңЁж„ҹеә”еҢәеҶ…д»Һй—ЁеҸЈз»ҸиҝҮдёҚдјҡеҜ№зі»з»ҹзҡ„жҺ§еҲ¶дә§з”ҹе№Іжү°
иҮӘеҠЁй©ҫ驶жҺ§еҲ¶жҠҖжңҜеҢ…жӢ¬иҪҰйҒ“дҝқжҢҒзі»з»ҹ(LKA)гҖҒиҮӘйҖӮеә”е·ЎиҲӘжҺ§еҲ¶зі»з»ҹ(ACC)гҖҒиҮӘеҠЁжіҠиҪҰзі»з»ҹ(AP)гҖҒзҙ§жҖҘеҲ¶еҠЁ(AEB)е’ҢеҚ«жҳҹеҜјиҲӘзі»з»ҹзӯүпјҡ
иҪҰйҒ“дҝқжҢҒзі»з»ҹ(LKA)пјҡдҪҝжұҪиҪҰйҒөеҫӘйҒ“и·Ҝж Үеҝ—е’ҢеЈ°йҹіиӯҰе‘Ҡ并еңЁиҪҰиҫҶејҖе§ӢеҒҸ移иҪҰйҒ“ж—¶и°ғж•ҙж–№еҗ‘пјҢдҝқиҜҒжұҪиҪҰжІҝзқҖзӣ®ж ҮиҪҰйҒ“зәҝиЎҢ驶гҖӮ
иҮӘйҖӮеә”е·ЎиҲӘжҺ§еҲ¶зі»з»ҹ(ACC)пјҡдҪҝжұҪиҪҰе’ҢеүҚйқўзҡ„иҪҰиҫҶе§Ӣз»ҲдҝқжҢҒдёҖдёӘе®үе…Ёзҡ„и·қзҰ»пјҢзЎ®дҝқж— дәәй©ҫ驶жұҪиҪҰзҡ„е®үе…ЁжҖ§гҖӮ
иҮӘеҠЁжіҠиҪҰзі»з»ҹ(AP)пјҡдҪҝж— дәәй©ҫ驶жұҪиҪҰиғҪеӨҹйЎәеҲ©ең°е®һзҺ°еңЁеҒңиҪҰдҪҚзҡ„еҖ’е…Ҙе’ҢзҰ»ејҖгҖӮ
зҙ§жҖҘеҲ¶еҠЁзі»з»ҹ(AEB)пјҡдҪҝжұҪиҪҰеңЁйҒҮеҲ°зҙ§жҖҘжғ…еҶөж—¶иғҪеӨҹе……еҲҶжңүж•ҲеҲ¶еҠЁпјҢеҗҢж—¶дҪҝж— дәәй©ҫ驶жұҪиҪҰеӨ„дәҺдәәзұ»зҡ„зӣ‘и§Ҷе’ҢжҺ§еҲ¶иҢғеӣҙд№ӢеҶ…гҖӮ
дёӢйқўе…ідәҺиҜҘиҮӘеҠЁй©ҫ驶系з»ҹиҜҙжі•й”ҷиҜҜзҡ„жҳҜпјҲ пјү
A . иҮӘеҠЁжіҠиҪҰзі»з»ҹ(AP)гҖҒиҮӘйҖӮеә”е·ЎиҲӘжҺ§еҲ¶зі»з»ҹ(ACC)йғҪеұһдәҺиҮӘеҠЁжҺ§еҲ¶
B . зҙ§жҖҘеҲ¶еҠЁзі»з»ҹ(AEB)еңЁжЈҖжөӢеҲ°дёҺеүҚиҪҰиҪҰи·қе°ҸдәҺи®ҫе®ҡеҖјж—¶пјҢзҙ§жҖҘеҲ¶еҠЁпјҢиҜҘзі»з»ҹдёәй—ӯзҺҜжҺ§еҲ¶
C . жұҪиҪҰејҖеҗҜиҮӘйҖӮеә”е·ЎиҲӘжЁЎејҸпјҢеңЁиЎҢ驶иҝҮзЁӢдёӯ马и·Ҝдёӯй—ҙзӘҒ然зӘңеҮәдёҖжқЎе°ҸзӢ—еҜјиҮҙиЎҢ驶йҖҹеәҰеҸ‘з”ҹеҸҳеҢ–пјҢеұһдәҺиҜҘзі»з»ҹзҡ„е№Іжү°еӣ зҙ
D . иҪҰйҒ“дҝқжҢҒзі»з»ҹ(LKA)зҡ„иў«жҺ§еҜ№иұЎжҳҜжұҪиҪҰ
дёӢеҲ—еҜ№дәӨйҖҡи·ҜеҸЈзәўз»ҝзҒҜе®ҡж—¶жҺ§еҲ¶зі»з»ҹзҡ„и®ҫи®ЎеҲҶжһҗдёҚжӯЈзЎ®зҡ„жҳҜ( )
A . иҜҘзі»з»ҹжҳҜејҖзҺҜжҺ§еҲ¶зі»з»ҹ
B . иў«жҺ§еҜ№иұЎжҳҜжҢүз…§зәўз»ҝзҒҜжҢҮзӨәиЎҢ驶зҡ„иҪҰиҫҶ
C . жҺ§еҲ¶еҷЁеҸҜд»ҘйҖүз”Ёе®ҡж—¶еҷЁ
D . зі»з»ҹзҡ„иҫ“е…ҘйҮҸжҳҜи®ҫе®ҡзҡ„ж—¶й—ҙ
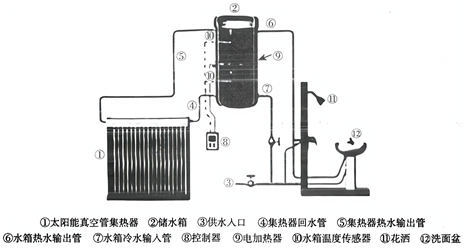
еҰӮеӣҫжүҖзӨәдёәеӨӘйҳіиғҪзғӯж°ҙеҷЁзі»з»ҹзӨәж„ҸеӣҫгҖӮзңҹз©әз®ЎйӣҶзғӯеҷЁеҲ©з”ЁеӨӘйҳіиғҪе°ҶеӮЁж°ҙз®ұдёӯзҡ„ж°ҙеҠ зғӯеҗҺдҫӣз”ЁжҲ·дҪҝз”ЁгҖӮеҪ“йҳіе…үдёҚи¶іжҲ–з”ЁжҲ·з”Ёж°ҙйҮҸиҝҮеӨ§ж—¶пјҢеҸҜиҮӘеҠЁеҗҜеҠЁз”өеҠ зғӯеҷЁеҜ№еӮЁж°ҙз®ұдёӯзҡ„ж°ҙеҠ зғӯгҖӮж°ҙдҪҚдҪҺж—¶жҺ§еҲ¶еҷЁеҸҜд»ҘжҺ§еҲ¶дҫӣж°ҙе…ҘеҸЈејҖе…іжү“ејҖпјҢеӮЁж°ҙз®ұдёӯж°ҙж»Ўж—¶иғҪиҮӘеҠЁеҒңжӯўиҝӣж°ҙпјҢеҪ“еӮЁж°ҙз®ұдёӯзјәж°ҙж—¶еҸ‘еҮәжҠҘиӯҰгҖӮж №жҚ®иҜҘзі»з»ҹеӣһзӯ”д»ҘдёӢй—®йўҳпјҡ
-
пјҲ1пјү иҜҘзі»з»ҹзҡ„иЎҘж°ҙжҺ§еҲ¶зі»з»ҹзҡ„жҺ§еҲ¶жүӢж®өе’ҢжҺ§еҲ¶ж–№ејҸеҲҶеҲ«дёәгҖҒпјҲA .иҮӘеҠЁжҺ§еҲ¶пјӣB .жүӢеҠЁжҺ§еҲ¶пјӣC .ејҖзҺҜжҺ§еҲ¶пјӣD .й—ӯзҺҜжҺ§еҲ¶пјүпјӣ
-
пјҲ2пјү иҜҘзі»з»ҹдёӯжңүеӨҡдёӘеӯҗзі»з»ҹпјҢе…¶дёӯеҜ№ж°ҙеҠ зғӯзҡ„еӯҗзі»з»ҹжҳҜгҖҒпјҲA .з”өеҠ зғӯпјӣB .еҚ«жөҙи®ҫж–ҪпјӣC .ж°ҙдҪҚжҺ§еҲ¶еӯҗзі»з»ҹпјӣD .зңҹз©әз®ЎйӣҶзғӯпјӣE .ж°ҙеҫӘзҺҜеӯҗзі»з»ҹпјүпјӣ
-
пјҲ3пјү иҜҘжҺ§еҲ¶зі»з»ҹдёӯзҡ„з”өеҠ зғӯеҷЁеұһдәҺзі»з»ҹдёӯзҡ„пјҲA .жҺ§еҲ¶еҷЁпјӣB .жү§иЎҢеҷЁпјӣC .иў«жҺ§еҜ№иұЎпјүпјӣ
-
пјҲ4пјү еңЁи®ҫи®Ўж—¶иҰҒз»ҹзӯ№е…јйЎҫеӮЁж°ҙз®ұж°ҙдҪҚжҺ§еҲ¶гҖҒж°ҙжё©жҺ§еҲ¶гҖҒйӣҶзғӯеҷЁйӣҶзғӯе’ҢеҶ·зғӯж°ҙеҫӘзҺҜгҖҒиҮӘжқҘж°ҙиҫ“е…Ҙе’Ңзғӯж°ҙиҫ“еҮәзӯүжҺ§еҲ¶зӣ®ж ҮгҖӮиҝҷдҪ“зҺ°дәҶзі»з»ҹеҲҶжһҗзҡ„пјҲA .з»јеҗҲжҖ§пјӣB .科еӯҰжҖ§пјӣC .ж•ҙдҪ“жҖ§пјүеҺҹеҲҷгҖӮ
дәә们йҖҡиҝҮз©әи°ғеҷЁеҜ№жҲҝй—ҙзҡ„жё©еәҰиҝӣиЎҢжҺ§еҲ¶пјҢдҪҝжҲҝй—ҙжё©еәҰеӨ„дәҺдәәдҪ“йҖӮе®ңзҡ„зҠ¶жҖҒпјҢжҳҜжҺ§еҲ¶еңЁпјҲ пјүж–№йқўзҡ„еә”з”ЁгҖӮ
A . з”ҹжҙ»
B . з”ҹдә§
C . еӣҪйҳІ
D . еҶӣдәӢ
жҹҗеӯҰж Ўй“ғеЈ°жҺ§еҲ¶зі»з»ҹзҡ„е·ҘдҪңиҝҮзЁӢеҰӮдёӢпјҡз”өи„‘ж №жҚ®и®ҫе®ҡзҡ„ж—¶й—ҙйЎәеәҸпјҢеҸ‘еҮәз”өдҝЎеҸ·з»ҷеҠҹзҺҮж”ҫеӨ§еҷЁпјҢдҪҝе–ҮеҸӯеҸ‘еҮәй“ғеЈ°пјҢиҜҘжҺ§еҲ¶зі»з»ҹеұһдәҺпјҲ пјү
A . ејҖзҺҜжҺ§еҲ¶гҖҒжүӢеҠЁжҺ§еҲ¶
B . й—ӯзҺҜжҺ§еҲ¶гҖҒиҮӘеҠЁжҺ§еҲ¶
C . ејҖзҺҜжҺ§еҲ¶гҖҒиҮӘеҠЁжҺ§еҲ¶
D . й—ӯзҺҜжҺ§еҲ¶гҖҒжүӢеҠЁжҺ§еҲ¶
еҰӮеӣҫжүҖзӨәдёәжҹҗж¬ҫжҷәиғҪжү«ең°жңәеҷЁдәәпјҢе·ҘдҪңиҝҮзЁӢдёӯпјҢиҜҘжңәеҷЁдәәзҡ„з”өйҮҸдј ж„ҹеҷЁе®һж—¶зӣ‘жөӢиҮӘиә«з”өжұ з”өйҮҸпјҢ并е°ҶиҜҘз”өйҮҸдҝЎжҒҜдј йҖҒеҲ°жҺ§еҲ¶жЁЎеқ—пјҢеҰӮжһңе®һйҷ…з”өйҮҸдҪҺдәҺи®ҫе®ҡз”өйҮҸпјҢжҺ§еҲ¶жЁЎеқ—е°ұдјҡеҸ‘еҮәйңҖиҰҒе……з”өзҡ„жҢҮд»ӨпјҢе……з”өжЁЎеқ—жҺҘеҲ°жҢҮд»ӨеҗҺеј•еҜјжҷәиғҪжү«ең°жңәеҷЁдәәиҮӘеҠЁеӣһеҲ°е……з”өеӨ„иҝӣиЎҢе……з”өпјҢзӣҙеҲ°е……ж»ЎгҖӮиҜ·з»“еҗҲжүҖеӯҰзҹҘиҜҶеӣһзӯ”дёӢеҲ—й—®йўҳгҖӮ
-
пјҲ1пјү иҜ·й—®иҜҘжҺ§еҲ¶зі»з»ҹеұһдәҺејҖзҺҜжҺ§еҲ¶зі»з»ҹиҝҳжҳҜй—ӯзҺҜжҺ§еҲ¶зі»з»ҹпјҹ
-
пјҲ2пјү иҜ·з»“еҗҲдёӢеӣҫпјҢе°Ҷзј–еҸ·(в‘ жҺ§еҲ¶жЁЎеқ—в‘Ўз”өйҮҸдј ж„ҹеҷЁв‘ўе®һйҷ…з”өйҮҸ)еЎ«е…ҘеҜ№еә”зҡ„з©әж јеҶ…гҖӮиҜҘжҺ§еҲ¶зі»з»ҹзҡ„жҺ§еҲ¶еҷЁжҳҜпјҢиў«жҺ§йҮҸжҳҜпјҢеҸҚйҰҲзҺҜиҠӮжҳҜгҖӮ

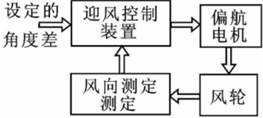
еҰӮеӣҫжүҖзӨәдёәйЈҺеҠӣеҸ‘з”өжңәйЈҺеҗ‘и·ҹиёӘжҺ§еҲ¶зі»з»ҹзҡ„зӨәж„ҸеӣҫгҖӮе…¶е·ҘдҪңеҺҹзҗҶдёәпјҡйЈҺеҗ‘жөӢе®ҡиЈ…зҪ®е®һж—¶жЈҖжөӢйЈҺиҪ®дёҺйЈҺеҗ‘зҡ„е®һйҷ…и§’еәҰе·®пјҢ并дёҺи®ҫе®ҡзҡ„и§’еәҰе·®жҜ”иҫғпјҢиҝҺйЈҺжҺ§еҲ¶иЈ…зҪ®ж №жҚ®е®һйҷ…и§’еәҰе·®жҺ§еҲ¶еҒҸиҲӘз”өжңәиҝҗиҪ¬пјҢи°ғж•ҙйЈҺиҪ®и§’еәҰпјҢдҪҝйЈҺиҪ®е§Ӣз»ҲеҜ№еҮҶйЈҺеҗ‘гҖӮй’ҲеҜ№йЈҺеҗ‘и·ҹиёӘжҺ§еҲ¶зі»з»ҹпјҢеӣһзӯ”дёӢеҲ—й—®йўҳпјҡ
-
пјҲ1пјү д»ҺжҺ§еҲ¶иҝҮзЁӢдёӯжңүж— дәәе·Ҙе№Ійў„зҡ„жғ…еҪўжқҘеҲҶпјҢиҜҘжҺ§еҲ¶еұһдәҺжҺ§еҲ¶пјӣжҢүжңүж— еҸҚйҰҲеҲҶпјҢиҜҘжҺ§еҲ¶зі»з»ҹеұһдәҺжҺ§еҲ¶зі»з»ҹгҖӮ
-
пјҲ2пјү иҜҘжҺ§еҲ¶зі»з»ҹиҫ“дәәйҮҸжҳҜи®ҫе®ҡзҡ„и§’еәҰе·®пјҢжҺ§еҲ¶еҷЁжҳҜпјҢжү§иЎҢеҷЁжҳҜпјҢиў«жҺ§еҜ№иұЎжҳҜпјҢиҫ“еҮәйҮҸжҳҜгҖӮ
дёӢеҲ—дёҺз”өжўҜзӣёе…ізҡ„жҺ§еҲ¶зі»з»ҹпјҢе…¶жҺ§еҲ¶ж–№ејҸзҡ„еҲӨж–ӯдёҚжӯЈзЎ®зҡ„жҳҜпјҲ пјү
A . з”өжўҜй—ЁйҳІеӨ№еҠҹиғҪжҳҜејҖзҺҜжҺ§еҲ¶пјҡеҪ“з”өжўҜй—Ёе…ій—ӯж—¶пјҢйҡңзўҚзү©жҢЎдҪҸзәўеӨ–е…үжқҹпјҢзәўеӨ–ж„ҹеә”еҷЁеҸ‘еҮәдҝЎеҸ·йҖҡиҝҮжҺ§еҲ¶еҷЁпјҢжҺ§еҲ¶з”өжңәеҸҚиҪ¬еҒңжӯўе…ій—Ёе№¶е…ій—Ё
B . з”өжўҜи¶…йҮҚжҠҘиӯҰжҳҜй—ӯзҺҜжҺ§еҲ¶пјҡеҪ“жЈҖжөӢиЈ…зҪ®жЈҖжөӢеҲ°з”өжўҜе®һйҷ…иҪҪйҮҚйҮҸи¶…иҝҮи®ҫе®ҡиҪҪйҮҚйҮҸ(еҚіи¶…иҪҪ)ж—¶пјҢжҺ§еҲ¶еҷЁеҸ‘еҮәз”өдҝЎеҸ·дҪҝиңӮйёЈеҷЁеҸ‘еҮәжҠҘиӯҰеЈ°
C . з”өжўҜзғҹйӣҫжҠҘиӯҰжҳҜејҖзҺҜжҺ§еҲ¶пјҡеҪ“з”өжўҜеҶ…йғЁзқҖзҒ«дә§з”ҹзғҹйӣҫпјҢзғҹйӣҫдј ж„ҹеҷЁжЈҖжөӢеҲ°еҺўдҪ“зғҹйӣҫдҝЎеҸ·пјҢжҺ§еҲ¶еҷЁеҸ‘еҮәдҝЎеҸ·пјҢе–ҮеҸӯеҸ‘еҮәжҠҘиӯҰеЈ°гҖӮ
D . з”өжўҜеҶ…ж‘„еғҸеӨҙиҪ¬еҠЁжҺ§еҲ¶жҳҜејҖзҺҜжҺ§еҲ¶пјҡзӣ‘жҺ§е®Өдәәе‘ҳеҸҜйҖҡиҝҮи®ҫеӨҮжҺ§еҲ¶з”өжўҜеҶ…зҡ„ж‘„еғҸжңәиҪ¬еҠЁпјҢи°ғж•ҙжӢҚж‘„и§’еәҰи®°еҪ•з”өжўҜеҶ…зҡ„е®һеҶөгҖӮ
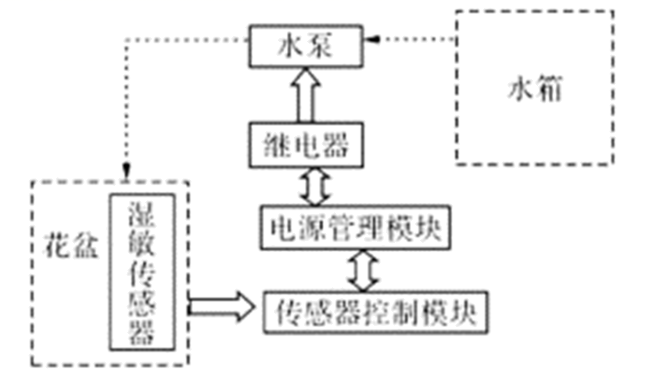
еҰӮеӣҫжүҖзӨәжҳҜе°ҸжҳҺеңЁиҖҒеёҲжҢҮеҜјдёӢи®ҫи®Ўзҡ„дёҖж¬ҫжҷәиғҪжөҮиҠұжҺ§еҲ¶зі»з»ҹзҡ„зӨәж„ҸеӣҫгҖӮеҪ“дј ж„ҹеҷЁжЈҖжөӢеҲ°иҠұзӣҶеңҹеЈӨж№ҝеәҰдҪҺдәҺи®ҫе®ҡзҡ„дёӢйҷҗеҖјж—¶пјҢж°ҙжіөжҠҪеҸ–ж°ҙз®ұдёӯзҡ„ж°ҙпјҢеҜ№иҠұзӣҶиҝӣиЎҢжөҮж°ҙпјҡеҪ“иҠұзӣҶеңҹеЈӨж№ҝеәҰиҫҫеҲ°и®ҫе®ҡзҡ„дёҠйҷҗеҖјж—¶пјҢж–ӯејҖж°ҙжіөз”өжәҗпјӣдёәйҳІжӯўж°ҙз®ұзјәж°ҙиҖҢж°ҙжіөз”өжңәй•ҝж—¶й—ҙз©әиҪ¬зғ§жҜҒпјҢиҜҘзі»з»ҹиҝҳи®ҫзҪ®дәҶз”өжңәдҝқжҠӨеӯҗзі»з»ҹпјҡеҪ“ж°ҙз®ұж°ҙдҪҚиҝҮдҪҺж—¶пјҢиҮӘеҠЁеҲҮж–ӯж°ҙжіөз”өжәҗпјҢдҝқжҠӨз”өжңәгҖӮиҜ·ж №жҚ®зӨәж„Ҹеӣҫе’ҢжҸҸиҝ°пјҢе®ҢжҲҗд»ҘдёӢд»»еҠЎпјҡ
-
пјҲ1пјү иҜҘзі»з»ҹзҡ„иҠұзӣҶеңҹеЈӨж№ҝеәҰжҺ§еҲ¶зі»з»ҹе’Ңз”өжңәдҝқжҠӨжҺ§еҲ¶зі»з»ҹзҡ„жҺ§еҲ¶ж–№ејҸеҲҶеҲ«еұһдәҺгҖҒпјҲеңЁвҖңA .дәәе·ҘжҺ§еҲ¶\B .иҮӘеҠЁжҺ§еҲ¶\C .ејҖзҺҜжҺ§еҲ¶\D .й—ӯзҺҜжҺ§еҲ¶вҖқдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«е…ҘжЁӘзәҝеӨ„пјүпјӣ
-
пјҲ2пјү иҜҘиҠұзӣҶеңҹеЈӨж№ҝеәҰжҺ§еҲ¶зі»з»ҹе’Ңз”өжңәдҝқжҠӨеӯҗзі»з»ҹзҡ„иў«жҺ§еҜ№иұЎеҲҶеҲ«гҖҒпјҲеңЁвҖңA .еңҹеЈӨ\B .ж°ҙз®ұ\C .ж°ҙжіөз”өжңә\D .ж°ҙз®ұзҡ„ж°ҙдҪҚвҖқдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«е…ҘжЁӘзәҝеӨ„пјүпјӣ
-
пјҲ3пјү иҜҘз”өжңәдҝқжҠӨеӯҗзі»з»ҹдёӯзҡ„дј ж„ҹеҷЁжңҖеҘҪйҖүз”ЁпјҲеңЁвҖңA .ж№ҝеәҰдј ж„ҹеҷЁ\B .ж°ҙдҪҚдј ж„ҹеҷЁ\C .зЈҒж•Ҹдј ж„ҹеҷЁвҖқдёӯйҖүжӢ©еҗҲйҖӮзҡ„йҖүйЎ№пјҢе°ҶеәҸеҸ·еЎ«е…ҘжЁӘзәҝеӨ„пјүпјӣ
жңҖиҝ‘жӣҙж–°



