一 控制的方式与应用 知识点题库
如图所示是一款能够监控机房内温度、湿度的仪器。当其温度或湿度高于设定上限或低于设定下限时,会自动发出报警声。以下分析正确的是( )

A . 机房内外的声音会对该报警系统产生干扰
B . 温度、湿度上下限要人为设定的,该报警系统为人工控制
C . 温度、湿度是输入量,报警声是输出量
D . 报警器是该控制系统的执行器
以下属于闭环控制系统的是( )
A . 恒温箱温度控制系统
B . 声控灯
C . 自动水龙头的出水控制
D . 音乐喷泉
如图所示是一款节能扶梯,当传感器检测到乘客后,控制电路控制电机,使扶梯从慢行状态逐渐加速到正常运行速度;当乘客离开后自动延时2-3秒钟,扶梯再减速到慢行状态。下列关于节能扶梯控制系统分析中,正确的是( )

A . 控制方式属于闭环控制
B . 控制量是扶梯慢行速度与正常速度的差值
C . 输入量为传感器接受的信息
D . 输出量是自动延时的时间
电子警察是现代道路交通安全管理的有效手段,计算机根据雷达探测到的汽车位置变化信号,计算出汽车的行驶速度并判断是否超速,如果超速则启动照相机抓拍,并将拍摄到的图像信息输送到监控中心。请根据上述说明,完成以下任务:
-
(1) 该控制系统的控制方式属于控制(在①开环;②闭环中选择一项,将序号填写在横线处);
-
(2) 该控制系统的控制手段属于 (在①手动控制;②自动控制中选择一项,将序号填写在横线处);
-
(3) 该控制系统的输出量是 (在①汽车的行驶速度;②超速车辆的图像;③雷达信号中选择一项,将序号填写在横线处);
-
(4) 为了实时监测汽车行驶速度,应用雷达技术探测汽车的位置变化信号,通过数学模型计算出汽车的行驶速度,判断是否超速。这体现了系统分析的原则(在①整体性;②科学性;③综合性中选择一项,将序号填写在横线处);
-
(5) 照相机对超速车辆抓拍时会受到各种干扰,以下因素中不属于干扰因素的是 (在①雨雾;②沙尘;③车辆速度中选择一项,将序号填写在横线处)。
风力发电机运行时风轮对准风向才能获得最大风能,如图所示是风力发电机跟踪风向的控制系统示意图,风向测定装置将检测到的风向信号传递给迎风控制装置与设定值比较,迎风控制装置根据角度偏差信号控制偏航电机运转,调整风轮角度,使风轮始终对准风向。

-
(1) 根据描述,在跟踪风向的控制系统方框图中的横线处填写相应的内容;

① ② ③ ④ ⑤
-
(2) 风向测定装置将检测到的风向信号传递给迎风控制装置与设定值比较的过程称为。(从干扰;反馈;控制 中选择一项,将正确填在横线处)
如图所示是智能清洁机器人,具有吸尘、防撞功能。吸尘系统用电机带动清扫刷转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构产生的吸力将灰尘吸入灰尘存储器中。防撞系统中传感器检测与周围障碍物的距离,单片机对信号加以判断,控制电机驱动轮子改变行驶方向以躲避障碍。如果吸尘系统与防撞系统的被控对象分别为清扫刷和轮子,则以下分析不合理的是( )

A . 防撞系统的传感器可以选用声敏传感器
B . 吸尘系统和防撞系统都属于开环控制系统
C . 吸尘系统和防撞系统的执行器都是电机
D . 吸尘系统和防撞系统的控制器都是单片机
如图所示是有创多控模式呼吸机系统示意图。其中定压型控制是当呼吸道内压力达到预计值后,呼吸机打开呼气阀,胸廓和肺被动性萎陷或由负压产生呼气,当气道内压力不断下降,呼吸机再次打开吸气阀吸气;定容控制则是打开吸气阀将预计潮气量送入肺内,达到预计气量后,停止供气,进入呼气状态。医护人员可根据患者的血氧浓度选择最佳的控制模式。下列说法中不正确的是( )
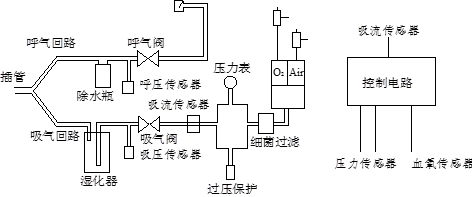
A . 根据血氧浓度设定控制模式属于人工控制
B . 定压型和定容型模式都属于开环控制
C . 定容控制中的吸流传感器是反馈中不可缺少的检测装置
D . 控制电路是两种控制模式的控制器
无绳蒸汽电熨斗是由发热元件、温控器、指示灯、电源接线柱和电源插头等组成的。使用时,先给水箱注水;顺时针拧动调挡按钮到合适的功率挡位,插上电源,使温控器对发热元件通电发热,对电熨斗底板进行加热,同时工作指示灯亮,本产品具有恒温功能,当温度超过额定温度时,恒温功能启动并自动切断电源;当温度下降到低于额定温度时,机器会自动接通电源并继续对电熨斗底板加热。另外本产品还有自动关熄功能,如果电熨斗未使用的时间达到8分钟,熨斗将自动关闭。要让熨斗再次加热,必须取下熨斗(如果熨斗在基座上),然后将其放回基座。

-
(1) 该温度控制系统的控制方式和控制手段分别属于 (在①开环;②闭环;③手动;④自动中选择一项,将序号填写在横线处)。
-
(2) 该恒温控制系统的最终控制对象是 (在①指示灯;②水箱;③调挡按钮;④电熨斗底板中选择一项,将序号填写在横线处)。
-
(3) 本产品还有自动关熄功能,如果熨斗未使用的时间达到8分钟,熨斗将自动关闭。要让熨斗再次加热,必须取下熨斗(如果熨斗在基座上),然后将其放回基座。这主要体现了系统的 (在①目的;②整体;③环境适应;④动态中选择一项,将序号填写在横线处)性。
-
(4) 下列因素中属于该温度控制系统优化的影响因素的是 (在①被熨烫衣服的大小;②热能主机功率;③基座温度;④室外气温中选择一项,将序号填写在横线处)。
码垛指将货物按照一定的顺序与层次整齐地堆叠起来。为了解放工人繁重的码垛劳动,提高码垛的效率,在许多行业的生产中已经使用了码垛机器人。如图是一种常见的码垛机器人,主要由操作机、控制柜、气体发生装置、真空发生装置和安全保护装置等部分组成。码垛机器人的工作方式:由操控人员在示教器上设定好机器人的作业程序,然后通过机械手爪把从传送带上送过来的货物堆叠到指定的托盘上。请根据示意图和描述完成以下任务:

⒈控制柜;⒉示数器;⒊气体发生装置;⒋真空发生装置;⒌操作机;⒍机械手爪;⒎货物;⒏传送带;⒐托盘
-
(1) 为了解放工人繁重的码垛劳动,提高码垛的效率,在许多行业的生产中已经使用了码垛机器人, 这体现了技术具有作用“”(在 A .解放人;B .保护人;C .发展人中选择合适的选项,将序号填写在横线处);
-
(2) 该控制系统的控制方式和被控对象分别是“”和“”(在 A .开环控 制;B .闭环控制;C .机械手爪;D .货物中选择合适的选项,将序号填写在横线处);
-
(3) 该控制系统的输出量是“”(在 A .货物的堆码位置;B .货物的最初位置中选择合 适的选项,将序号填写在横线处);
-
(4) 码垛机器人,主要由操作机、控制柜、气体发生装置、真空发生装置和安全保护装置等部分组 成,其中任何一个部件损坏都会影响码垛机器人的正常工作,这体现了系统的“”(在 A .目的性;B .动态性;C .整体性;D .环境适应性中选择合适的选项,将序号填写在横线处);
-
(5) 为了确保装箱货物的质量,在进入自动化码垛之前的传送带上还会设置重量复检机,可以检测 出箱中的货物是否漏装、多装,则传感器可选用“”(在 A .计数传感器;B .压力传感器; C .红外传感器中选择合适的一个选项,将序号填写在横线处);
如图所示,某数控机床的基本组成包括加工程序载体、数控装置、伺服驱动装置、机床主体和其他辅助装置。其中伺服系统是数控机床的重要组成部分,用于实现数控机床的进给伺服控制和主轴伺服控制。伺服系统的作用是把接受来自数控装置的指令信息,经功率放大、整形处理后,转换成机床执行部件的直线位移或角位移运动。测量元件将数控机床各坐标位的实际位移值检测出来并经反馈系统输入到机床的数控装置中,数控装置对反馈回来的实际位移值与指令值进行比较,并向伺服系统输出达到设定值所需的位移量指令。请完成下面小题。

-
(1) 关于该数控机床说法不正确的是( )A . 数控机床控制系统为闭环控制 B . 控制量是向伺服系统输出的达到设定值所需的位移量 C . 给定量是数控机床各坐标轴的设定位移值 D . 被控对象是机床主体
-
(2) 从系统角度分析,下列说法不正确的是( )A . 数控机床提高了零件加工的效率和质量,体现了系统的目的性 B . 检测装置的精度太低,会使数控装置向伺服系统输出的位移指令偏差较大,体现了系统的相关性 C . 数控机床传动系统容易发生磨损,体现了系统的动态性 D . 设计数控机床系统时要考虑加工精度,以及加工效率,体现了系统分析的整体性原则
小明家的衣服晾在阳台外面有时会被雨淋湿,小明发现这一问题后尝试设计一新型晾衣架,设想下雨时晾衣架能自动收至雨蓬下,以免衣服被淋湿。其中有关控制系统的设计小明遇到了问题,现在请你帮着解决:
该控制系统要达到的目标是( )
A . 下雨时雨蓬会自动收起
B . 能自动收衣服
C . 能预测天是否会下雨
D . 下雨时晾衣服架能自动收至雨蓬下
如图所示为数控机床系统控制图,程序输入数控系统后,muc处理并输出的脉冲信号来控制步进电动机。它以变换脉冲信号来控制机床工作台坐标位移量和位移速度、方向。这种控制方式的最大特点是控制方便、结构简单、价格便宜。

-
(1) 以下关于该数控机床控制系统说法中正确的是( )A . 该控制系统是闭环控制系统 B . 该控制系统执行器为主轴和刀具 C . 该控制系统控制器为MCU D . 该控制系统控制量为机床工作台的位移量及速度、方向
-
(2) 该数控系统由于电机的老化及丝杠的磨损,容易出现不稳定的情况,因而位移精度不高,为了提高机床工作台位置的控制精度,需要对该系统进行优化,下列措施中合理的是( )A .
 B .
B .  C .
C .  D .
D . 
如图所示是无拖曳航天器控制系统,该系统主要由检查质量块悬浮控制环路、无拖曳控制器、微推进器和航天器平台等模块组成,其中检查质量块悬浮控制环路可以保持检验质量处于框架的中心位置,同时能高精度获取航天器平台和检验质量块之间的位置偏差,并传输给无拖曳控制器,微推进器产生推力,保证航天器平台以检验质量块为中心。该系统可以减小航天器受宇宙环境扰动的影响,确保超稳的实验环境。下列关于无拖曳航天器控制系统说法合理的是( )
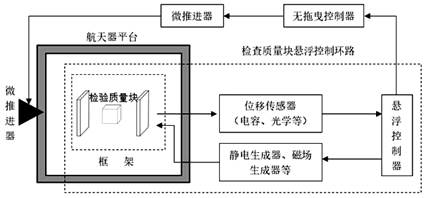
A . 被控对象是航天器平台,控制量是微推进器产生的推力大小
B . 该控制系统属于自动、开环控制
C . 由于该系统可以抵消太空环境对航天器平台的扰动力,所以太阳光压等宇宙环境因素不属于该系统的干扰因素
D . 研究检验质量块悬浮控制环路时,要逐个分析位移传感器、悬浮控制器等要素的功能,采用了黑箱方法
如图所示的是家庭太阳能光伏发电系统,把太阳能转化成电能储存起来,然后再通过电源逆变器转化成各种用电器所需要的较高电压负荷。关于光伏发电控制系统分析,以下说法中不正确的是( )
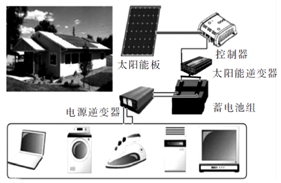
A . 被控对象是蓄电池组
B . 执行器是太阳能逆变器
C . 检测装置是太阳能板
D . 该控制属于闭环控制
如图所示的食堂智能结算台,消费者把菜品放在摄像头下,结算台的CPU将扫描的菜品与数据库中的图形对比识别,统计整单金额,并在显示器上显示。消费者核对后,自助刷卡支付。下列关于该智能结算台控制系统的说法中,正确的是( )

A . 控制方式属于闭环控制
B . 摄像头是该控制系统的检测装置
C . 被控量是食堂饭卡里的金额
D . 菜品分量的多少是该控制系统的干扰因素
小通设计了如图所示的一款小音箱,带有音乐播放控制系统。如果把手伸进它的口中,就会播放几首歌曲,然后自行停止。请完成下面小题。

-
(1) 该控制系统的控制手段和方式属于( )A . 自动、开环控制 B . 人工、开环控制 C . 自动、闭环控制 D . 人工、闭环控制
-
(2) 在选用该控制系统的传感器时,以下最合适的是( )A . 声音传感器 B . 红外传感器 C . 温度传感器 D . 气敏传感器
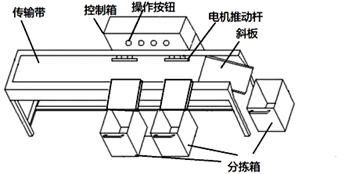
如图所示为图书馆图书分拣设备,其结构包括分拣设备、传输带、控制箱和推动电机等,传输带的下方设有RFID读写器,控制箱将得到的信息与库中所保存的图书信息进行比较,发出指令信号驱动相应电机和推杆运作,将图书推送至不同的斜板,从而滑进相应的分拣箱里,从而达到对图书进行分拣的目的。请根据示意图和描述,完成以下任务。
-
(1) 该分拣控制系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 系统设计时,需要对传输带运行速度,推杆运行长度等进行建模分析,体现了系统分析的(在“A .整体性原则;B .科学性原则;C .综合性原则”中选择合适的选项,将序号填入横线处);
-
(3) 下列不属于该控制系统干扰因素的是(在“A .控制箱性能不稳定;B .传输带的磨损;C .书本条形码异常”中选择合适的选项,将序号填入横线处);
-
(4) 小明设计了三种结构的斜板,其中合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A .
 B .
B .  C .
C . 
-
(5) 小明用钢铁材料对上题的设计方案进行制作后,为提高硬度和防锈能力,他在实验室中能进行合理操作的是(在“A .淬火;B .回火;C .喷涂防锈漆和油漆”中选择合适的选项,将序号填入横线处);
如图所示为某机器控制系统的工作流程图,分别由电动机控制子系统、机械臂控制子系统组成。在电动机控制子系统中,两个检测元件检测伺服电机的转角和速度,输送给伺服控制器与工程师设定的值进行比较,伺服控制器根据比较的差值发出控制信号,驱动装置将信号转变成相应的电流驱动伺服电机。在机械臂控制子系统中,伺服电机驱动机械臂,达到对机械臂的位置和运动精确控制的目标。下列关于电动机子系统的分析中正确的是( )

A . 电动机子系统是闭环控制子系统
B . 伺服电机是执行器
C . 驱动装置是控制器
D . 被控对象是机械臂
以下是小明设计的水箱缺水自动加水实验电路(图a),他想把该电路改进成水位控制和有清浊度检测功能的电路。请完成以下问题:

-
(1) 图a电路实现水箱缺水自动加水控制系统的控制方式属于 (在“A .开环电子控制;B .闭环电子控制”中选择合适的选项,将序号填入横线处) ;
-
(2) 当加水至低水位线时,水泵停止工作,为实现低于低水位线自动加水,到低水位线后能继续加水,请选择合适电子元器件,并补充完成图b虚框1中部分电路;

-
(3) 根据任务目标,小明完成了图c电路设计:水位下限为基本蓄水要求,水箱水位达到水位上限线停止加水:加水过程中,用光敏电阻Rg检测进水管(进水管透明材料制作)水质,变浑浊了也停止加水,请在虚框2中用同种逻辑门完成电路连接;

-
(4) 为提高水质清澈度检测精度,下列调节最优方案是 (在下列选择中选择合适的选项,将序号填入横线处);A . 调大R5 B . 调小R5 C . 调大R6 D . 调小R6
门禁系统主要由控制器、感应式读卡器、电控门锁和开门按钮等组成,其工作原理:读卡头用来读取刷卡人员的智能卡信息(卡号),将接收到的信号转换成电信号送到门禁控制器中,控制器根据接收到的信息,判断该持卡人是否得到过授权在此时间段可以通过大门,根据判断的结果完成开锁、保持闭锁等工作。
-
(1) 小明对门禁系统进行分析,下列说法不正确的是( )A . 门禁系统可以设定各类人员允许通过大门的时间段,体现了系统的目的性 B . 每隔6个月,技术人员要对门禁系统进行检查维护,体现系统的动态性 C . 出现停电情况,门禁系统能通过自备电源正常工作,体现了系统的环境适应性 D . 设计时先保证门禁系统使用的安全性,再考虑门禁系统使用的成本,体现了系统分析的整体性原则
-
(2) 小明外出学习时经常忘了带智能卡,而不能正常开门,他学习了有关控制系统的知识后,希望通过增加人脸识别装置来实现系统优化,设计时他以门锁为被控对象,下列构思可行的是( )A . 电子开关可作为系统的输入装置 B . 优化后的门禁系统还存在检测装置 C . 优化后的门禁系统属于闭环控制系统 D . 人脸识别子系统和读卡子系统间互不相关
最近更新



