杠杆的平衡条件 知识点题库
为安全起见,妈妈为小明买了一块浮板辅助练习游泳.妈妈认为浮板能漂在水面上是因为它轻,小明认为妈妈的说法不对,科学的说法是因为浮板的密度比水的密度小.为验证自己的说法,小明设计了如下实验:
-
(1) 找一根轻质均匀木棍、细绳(质量忽略不计)和一块标有“净重115g”字样的新肥皂,用如图所示的方法进行测量.测量时,使木棍在 位置平衡,记下A、B的位置,用刻度尺测出OA=10cm,OB=40cm,则浮板的质量为 kg.
-
(2) 把浮板压入装满水的桶中刚好浸没,用塑料袋(质量忽略不计)收集溢出的水,用(1)所述方法测得溢出水的质量为4.6kg,则浮板的体积为 m3 , 密度为 kg/m3;用刻度尺测肥皂的长、宽、厚,算出肥皂的密度为1.33×103kg/m3 . 浮板在水中漂浮而肥皂在水中下沉,说明小明的说法是正确的.小明用此浮板游泳时浮板受到的最大浮力为 N.
-
(3) 根据这个实验结果,妈妈说原来用密度比水小的材料制成的物体才能漂浮在水上,这种说法 (选填“正确”或“不正确”).请举例说明 .
如图所示,在使用相同的钩码进行“探究杠杆的平衡条件”的实验中,要使调好的杠杆重新在水平位置平衡,应在A处悬挂钩码的个数是( )

A . 1个
B . 2个
C . 3个
D . 6个
如图是使用简单机械匀速提升同一物体的四种方式(不计机械重和摩擦),其中所需动力最小的是( )
A .  B .
B .  C .
C .  D .
D . 
C .
D . 如图甲所示,将一根质量分布均匀的金属硬棒的一端通过铰链固定在O点,并能使金属棒绕O点在竖直面内自由转动。现通过一个“拉力—距离传感器”可对硬棒施加一个竖直向上的力,使硬棒在水平位置始终保持平衡。已知硬棒的长度是1.2m,“拉力—距离传感器”可自动记录拉力F的大小和拉力作用点到O点的距离x,并将记录的结果输送到计算机绘制出F与x的关系图线。若计算机上显示出的拉力F与距离x倒数的变化关系如图乙所示,则可知金属棒所受的重力为( )


A . 50N
B . 100N
C . 60N
D . 20N
如图甲为塔式起重机简易示意图,塔式起重机主要用于房屋建筑中材料的输送及建筑构件的安装。(动滑轮重、绳重及摩擦均不计,g 取 10 牛/千克)

-
(1) 为保持平衡,起重臂的长度越长的塔式起重机,配备的平衡重的质量应越。
-
(2) 图乙为起重机钢丝绳穿绳简化示意图
①滑轮 a 的作用是。
②若钢丝绳能承受的最大拉力为 3×10 4 牛,则能吊起货物的质量不能超过多少千克?
-
(3) 若将重为 1.2×10 4 牛的货物由地面沿竖直方向匀速提升 30 米,再沿水平方向移动 20
米,则此过程中克服货物重力做功多少焦?
如图所示,A、B是两个完全相同的匀质长方形木块,长为l,叠放在一起,放在水平桌面上,端面都与桌边平行。A放在B上,右端有  l伸出B外,为保证两木块不翻倒,木块B伸出桌边的长度不能超过( )
l伸出B外,为保证两木块不翻倒,木块B伸出桌边的长度不能超过( )
l伸出B外,为保证两木块不翻倒,木块B伸出桌边的长度不能超过( ) 
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
如图所示为科学课本中的演示实验装置图或结构模型,下列有关的叙述错误的是( )

A . 由甲图实验得出的“杠杆平衡条件”结论具有偶然性
B . 用乙图研究“重力势能大小与高度有关”,则木块滑行距离表示球的重力势能大小
C . 丙图中a表示是做功冲程,b可模拟该冲程
D . 丁图可研究“电功率与电流有关”,两灯的规格(电阻)应不同
如图所示,可绕O点转动的轻质杠杆,在D点挂一个重为G的物体M,用一把弹簧测力计依次在A,B,C三点沿圆O相切的方向用力拉,都使杠杆在水平位置平衡,读出三次的示数分别为F1 , F2 , F3 , 它们的大小关系是( )

A . F1=F2=F3=G
B . F1>F2>F3>G
C . F1<F2<F3<G
D . F1>F2=F3=G
汽车更换轮胎时需要把车轴抬起来,这时可以使用“油压千斤顶”。下图是油压千斤顶的原理图。向下按动手柄,圆柱形小活塞把小油缸中的机油压向大油缸。大油缸中的油量增多,把圆柱形大活塞向上推,带着上面的重物上升。实验表明,加在密闭的液体上的压强,能够按照原来的大小向各个方向传递(这个规律叫做帕斯卡定律)。现在有一个油压千斤顶,有关尺寸如图所示。如果希望在手柄上用20牛顿的力向下压时就能在大活塞上举起1吨的重物,大活塞的直径至少是多少?(g=9.8牛/千克)

如图所示,有一根均匀铁棒,长为L,OA=L/4,重力G=600 N,为了不使这根铁棒的B端下沉,所需外力F至少应为N,若F的方向不变,微微抬起这根铁棒的B端,所需外力F′应为N。

如图所示,质量为2kg的小铁块静止于A端。ABCO为T型支架(质量忽略不计),可绕点O在竖直面内自由转动,A端搁在左侧的平台上,已知AC=1m,AB=0.75m,OB=0.5m,现用一个水平拉力F通过细线拉铁块,假定铁块启动后立即以0.1m/s的速度沿AC匀速运动,此时拉力F为10N。问:

-
(1) 铁块到达B点前,阻碍T型支架顺时针转动的力是;
-
(2) 支架能保持静止的最长时间是 秒。
嘉兴海绵城市建设功能初现,学校科学兴趣小组设计了如图所示的市政自动排水装置模型。控制电路由额定电压6V,最大容量为6Ah的蓄电池供电,蓄电池用某型太阳能电板充电。R0为定值电阻,R为压敏电阻,压敏电阻通过杠杆ABO与圆柱形浮体相连,AB:BO=3:1。(压板、杠杆和硬质连杆的质量、电磁铁线圈电阻及红绿指示灯功率忽略不计)

-
(1) 电路要求在水位上升到一定值时电磁铁吸引衔铁,红灯亮,排水泵工作。压敏电阻阻值随压力增大而。(选填“增大”或“减小”)
-
(2) 当硬质连杆对杠杆A点压力为90N时,杠杆对压敏电阻的压力是多少?
-
(3) 如果设定电磁铁线圈吸引衔铁的电流为30mA,压敏电阻阻值为80欧。定值电阻R0的阻值是多少?
-
(4) 该型太阳能电板的光电转化率接近20%。要求在2h内对控制电路的蓄电池充满电,则选用的太阳能电板的面积至少为多少?(太阳能每秒钟辐射到每平方米地面上按1×103J计算)
姐姐拿不动一大箱快递,喊弟弟一起用一根杆子把快递抬回家。姐姐和弟弟身高相仿,两人体重均约为50kg,双脚与地面接触面积均约为400cm2 , 肩膀对杆子作用点分别在杆子的两个端点,杆子重力忽略不计。快递箱总重为200N,悬挂点O恰在轻杆中点,问:

-
(1) 静止不动时,姐姐肩膀受到的压力约为N,弟弟对地面的压强约为Pa
-
(2) 走了一段路后,弟弟喊肩膀痛,为了减轻弟弟的压力,姐姐应把悬挂点O点(选填“靠近”或“远离”或“不变”)自己的肩膀。
某科学兴趣小组研究“杠杆的使用特点”。

-
(1) 实验前,发现杠杆左端偏高,杠杆(选填“处于”或“不处于”)平衡状态。
-
(2) 为了让杠杆处于水平平衡,接下去应如何操作:。
-
(3) 实验过程中如图ABCD所示,在杠杆P点挂上钩码,在Q点用弹簧测力计沿不同方向施力F,使杠杆保持水平位置平衡。动力F的方向与杠杆的夹角用θ表示,且0°<θ≤90°。分析图甲中A、B、C、D四图中的动力F的大小与夹角θ之间的关系,可得到初步结论:当不变时,动力F的大小随夹角θ增大而。
俯卧撑是一项常见的体育健身活动.如图所示是小明同学做俯卧撑时的示意图.小明重600N,1min钟内做俯卧撑30个,每做一次肩膀升高50cm。小明身体可视为杠杆,O为支点,A′为重心,OA=1m,AB=0.5m.求:

-
(1) 地面对手的支持力;
-
(2) 1min钟内小明所做的功;
-
(3) 小明做功的功率。
质量为 2.5kg 的圆柱体,其横截面的半径为 0.5m;放置在水平地面上,与高为 0.2m的台阶接触,接触部位足够粗糙,如图所示。现欲在圆柱体上施加一作用力,使它下部刚好脱离地面。
-
(1) 画出此作用力F最小的示意图
-
(2) 求此作用力F的最小值。
-
(3) 要使此圆柱体在10s内运动到台阶上,则功率至少为多少?
如图甲所示的力学装置,杠杆OAB始终在水平位置保持平衡,O为杠杆的支点,OB=20A,竖直细杆a的上端通过力传感器相连在天花板上,下端连接杠杆的A点,竖直细杆b的两端分别与杠杆的B点和物体M固定,水箱的质量为0.8kg,底面积为200cm2 , 不计杠杆、细杆及连接处的重力,力传感器可以显示出细杆a的上端受到作用力的大小,图乙是力传感器的示数大小随水箱中水的质量变化的图像,则( )
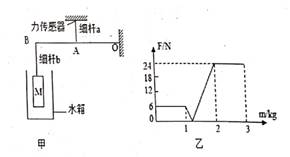
A . 物体M的密度为0.6×103kg/m3
B . 当传感器示数为0N时,加水质量为1.4kg
C . 当加水质量为1.8kg时,容器对桌面的压强为
D . 加水质量为2kg时,水对水箱底部的压力为31N
用图示装置探究杠杆的平衡条件。保持左侧的钩码个数和位置不变,使右侧弹簧测力计的作用点A固定,改变测力计与水平方向的夹角θ,则选项中关于动力F随夹角θ、动力臂L变化的关系图象中,可能正确的是( )

A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
如图所示是建设时所用的汽车起重机的结构示意图,O为吊臂的转动轴,吊臂OA前端装有滑轮组,C杆伸缩可改变吊臂的长短,D杆伸缩可改变吊臂与水平面的角度,支撑点为B,图中OB:OA=1:4,装在E里的电动机牵引钢丝绳,可利用滑轮组提升重物。现起重机30秒内将质量为2.5吨的重物匀速提升5米,电动机牵引力为F=1×104牛,求:

-
(1) D杆对吊臂的支持力为牛(本小题吊臂相对于重物的质量可不计,滑轮及绳重不计);
-
(2) 重物匀速上升时,滑轮组的有用功;
-
(3) 重物匀速上升时,电动机牵引力的功率。
如图,某演员将脚固定在地面上,整个身体犹如一根杠杆,绕踝关节向前倾斜45°。研究发现,这一动作会使足部的跟腱部位承受相当大的力量,可能会造成跟腱受伤或断裂。

-
(1) 请计算该演员在表演45°前倾时,跟腱肌肉拉力F的大小。(已知:演员的质量为60千克,以踝关节中心为支点,重力力臂约为0.7米,跟腱肌肉拉力F的力臂d约为0.05米。)
-
(2) 跟腱是小腿肌肉力量传送至足部的最主要结构,如人在踮脚站立时,小腿后部肌肉(选填“收缩”或“舒张”),通过跟腱拉动脚后跟向上。
-
(3) 正常人在快速奔跑时,跟腱承受的力量峰值可达体重的12.5倍,因此人在运动时要注意保护足部跟腱,下列做法可取的是 。A . 跑步前先活动关节热身 B . 适当锻炼增强关节的牢固性 C . 韧带扭伤要避免活动,及时治疗 D . 为提高跑步成绩,每天超负荷训练
最近更新



