简单开环控制系统的基本组成和工作过程 知识点题库
“神六”在空中运行中,在地面人员对其发出变轨指令的过程中,其控制的对象是( )
A . 返回舱
B . 推进舱
C . 轨道舱
D . 整个飞船
如图所示的飞剪控制系统,对钢板的剪切精度要求非常高。飞剪控制器通过激光测速仪、测宽仪检测板材运行速度和宽度数据,控制飞剪设备实现精确剪切。下列关于飞剪控制系统的分析中,正确的是( )
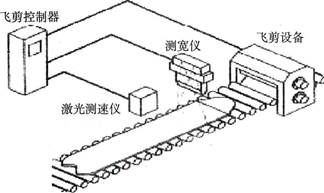
A . 控制方式属于闭环控制
B . 飞剪设备是执行器
C . 该控制系统控制精度高,无干扰因素
D . 输入量是给定的速度和板材宽度
如图所示为反应容器加料控制系统。系统工作时,流量计的信号传送到控制器,当达到设定所需的料量后,控制器下达信号电磁阀关闭,从而实现定量加料的功能,下列关于该控制系统的说法中,正确的是( )
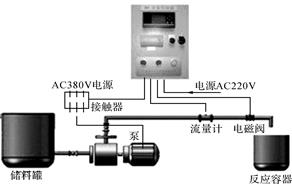
A . 流量计检测的是系统的输入量
B . 执行器是电磁阀
C . 被控对象是水泵
D . 反应容器容量的大小是干扰因素
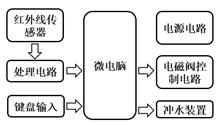
如图所示是红外感应马桶原理图。当红外线传感器检测到人体信号后输送给微电脑,微电脑接收到信号进行处理并发送给脉冲电磁阀,脉冲电磁阀接收信号后按指定的指令打开阀芯控制进水口出水。当人们离开时红外线感应器将信号传递给微电脑,微电脑根据信号,控制冲水装置排放适当的水量。请根据图及其描述,完成问题。
-
(1) 从系统角度分析,下列分析中不正确的是( )A . 马桶是由电磁阀控制子系统、冲水子系统等组成 B . 红外线传感器损坏,会影响马桶的工作,体现了系统的整体性 C . 设计时先考虑冲水量再考虑水箱大小、进水水压等参数,体现了系统分析的科学性原则 D . 冲水时从控制冲水时间改成控制水箱水位能够提高冲水量的精度
-
(2) 该马桶的电磁阀控制系统中的被控对象是( )A . 红外传感器 B . 电磁阀 C . 水箱 D . 水
如图是马桶水箱的内部结构示意图,拨动放水阀手柄打开出水阀放水,水箱的水位下降,浮球下落,进水阀打开进水;当水位上升时浮球被抬高,进水阀堵住进水口停止进水,从而保持水箱的水位,下列关于该水箱系统设计的描述中不正确的是( )
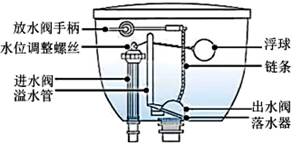
A . 时间长了,链条断裂,体现系统的动态性
B . 若浮球破损,则进水阀可能会一直处于打开状态,水位上升,水将从水箱顶部溢出
C . 拨动放水阀手柄,拉动链条,打开出水阀,体现了系统的相关性
D . 水位调整螺丝可用于锁定浮球的高度,从而设定水箱的水位
以下有关控制系统的说法,不正确的是( )
A . 输出量就是控制系统所要控制的量
B . 被控对象只能是控制系统所要控制的装置
C . 执行器就是直接对被控对象进行控制的装置或元件
D . 控制量就是执行器的输出信号
四轴无人机由飞控系统、气压定高控制系统及起落架自动收放系统等部分组成。其中,气压定高控制系统利用气压计测量空气压力,计算出无人机的高度,并与设定值进行比较,根据偏差值调整电机动力,使四轴无人机悬停于设定的高度:起落架自动收放系统检测到无人机飞行高度低于某一值时,控制单元控制伺服电机放下起落架。根据以上描述,完成问题。

-
(1) 从系统的角度考虑,下列说法不正确的是( )A . 飞控系统、气压定高控制系统及起落架自动收放系统等可视为四轴无人机的子系统 B . 设计时既要考虑到成本,又要考虑性能,体现了系统分析的综合性原则 C . 电机动力不足,四轴无人机很难悬停于指定的高度,体现了系统的动态性 D . 设计人员的技术水平是四轴无人机系统优化的影响因素
-
(2) 从控制的角度分析,下列说法不正确的是( )A . 气压定高控制系统存在检测装置,据此判定该系统为闭环控制系统 B . 气压定高控制系统的执行器是电机 C . 起落架自动收放系统的控制方式属于开环控制 D . 控制单元的控制精度不属于起落架自动收放系统的干扰因素
如图所示是一款防瞌睡帽。该帽子内置加速度计和陀螺仪,能感知驾驶员的头部动作,并利用智能算法较为准确地比较区分驾驶员瞌睡动作与检查仪表盘、看后视镜等驾车动作,该帽子中的主控制器确认为驾驶员瞌睡中,会发出指令使电子开关闭合,从而发出声音、光线、震动等叫醒驾驶员。下列关于该控制系统的分析正确的是( )

A . 执行器是电子开关
B . 被控对象是驾驶员
C . 控制量是声音、光线、震动等信号
D . 该系统含有检测装置和比较部分,所以属闭环控制系统
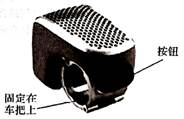
如图所示是一款智能车铃,用户可以录制自己的声音作为铃声播放,还能礼貌地向行人致歉。它拥有自动音量控制技术,当使用者按下按钮,系统根据检测到的环境噪声强度自动调节铃声的播放响度,以保证行人可以清楚地听见。它还具备防盗功能,一旦车铃离开自行车把手,就会鸣叫报警。请根据图及其描述,完成问题。
-
(1) 从系统角度分析,下列说法中不正确的是( )A . 可以播放个性化铃声,体现了系统的目的性 B . 能通过检测环境噪声的强度来调整铃声的播放响度,体现了系统的相关性 C . 该车铃系统可以分为自动音量控制子系统、铃音设置子系统、固定子系统等 D . 设计时兼顾个性化铃音、铃声响度的调节、防盗等需求,体现了系统分析的综合性原则
-
(2) 以下关于车铃的自动音量控制子系统的说法中正确的是( )A . 被控对象是铃声 B . 环境噪声为干扰因素 C . 检测装置参与了系统的反馈过程 D . 该系统为开环控制系统
如图所示是有创多控模式呼吸机系统示意图。其中定压型控制是当呼吸道内压力达到预计值后,呼吸机打开呼气阀,胸廓和肺被动性萎陷或由负压产生呼气,当气道内压力不断下降,呼吸机再次打开吸气阀吸气;定容控制则是打开吸气阀将预计潮气量送入肺内,达到预计气量后,停止供气,进入呼气状态。医护人员可根据患者的血氧浓度选择最佳的控制模式。下列说法中不正确的是( )
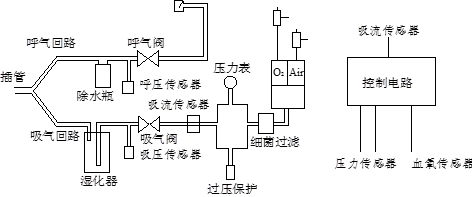
A . 根据血氧浓度设定控制模式属于人工控制
B . 定压型和定容型模式都属于开环控制
C . 定容控制中的吸流传感器是反馈中不可缺少的检测装置
D . 控制电路是两种控制模式的控制器
下图为某车的混合动力系统原理图,它利用发动机和电动机两种动力来驱动车轮。内燃机产生的动力分成两份,一份用来驱动车轮,另一份用来发电。车辆启动及低速、低负荷运转时,只需电动机驱动行驶;正常行驶时,电动机和发动机共同驱动,高效配合;上坡和加速行驶等需要高马力输出时,发动机和电动机同时达到最大功率。

这种混联方式提高了发动机和电动机动力的协同效应,实现了更低的油耗和更高的动力输出。
分析上述材料,回答下面问题:
-
(1) 请将上述系统用方框图表示,在下面横线处填写相应的内容。

-
(2) 在汽车设计时,要同时兼顾环保、安全、经济性、动力性等多个目标。这体现了系统分析的原则(选填①综合性;②科学性;③整体性)。
-
(3) 除上述油电混合动力汽车外,再列举两种你知道的新能源汽车。
如图所示的是某高楼供水自动增压控制系统示意图,其控制过程如下:当罐体水压低于一定值时,微电脑控制器发出指令使增压泵启动,将水压入罐体,提升罐体水压;当罐体水压达到一定值时,增压泵关闭。下列关于该控制系统的分析中正确的是( )
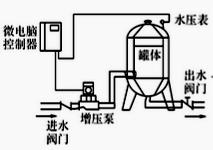
A . 执行器是出水阀门
B . 被控对象是水压表
C . 输出量是罐体内的实际水压
D . 控制量是增压泵的电流量
某校学生设置了雨天自动关窗装置,其工作原理:下雨时,湿度传感器把检测到的雨水信号传给放大及处理电路,启动电动机关闭窗户。关于这个控制系统,下列说法正确的是( )
A . 雨水信号是输出量
B . 控制器是电动机
C . 执行器是湿度传感器
D . 被控对象是窗户
新冠疫情发生后,车站、学校、医院、菜场等公共场所都安装了如图所示的人体测温监控摄像头,用于自动监测进出人员的体温并通过显示器实时显示,如有异常还会通过报警器报警。回答以下小题。

-
(1) 从系统的角度分析,下列说法中不正确的是( )A . 光电探测器的检测精度属于系统优化的影响因素 B . 光电探测器精度下降后影响测温结果,体现了系统的整体性 C . 监测方便快速,无接触,并且能监测多个目标,体现了系统的目的性 D . 设计时先考虑监测的准确性,再考虑监测的速度,体现了系统分析的整体性原则
-
(2) 下列关于人体温度监测控制系统中的说法不正确的是( )A . 该系统可以分为温度检测显示子系统和温度异常报警子系统 B . 该控制系统的输入量是人体的红外辐射信号 C . 温度异常报警子系统属于开环控制系统 D . 运动后监测到的体表温度影响测量结果,这属于干扰
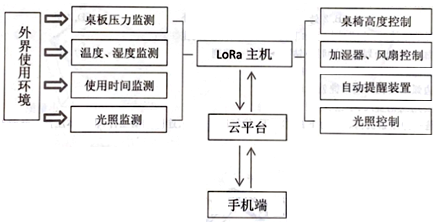
如图所示是“智能云平台课桌”的工作原理图。通过检测使用者的实时数据,用户可通过手机APP实时准确调节自己的学习环境,同时利用自动化监测的设备,使用户的学习环境始终处于一种舒适的条件,可以有效提高学习效率,降低学生近视和驼背的几率。请根据图及其描述,完成下面小题。
-
(1) 从系统的角度分析,下列说法中不正确的是( )A . 该系统由监测系统、主机、云平台等组成 B . 设计时先考虑加湿器控制再考虑风扇控制,体现了系统分析的整体性原则 C . 实时监测环境,降低了学生近视和驼背的几率,体现了系统的目的性 D . 电源电压的波动会影响该智能课桌系统对温度﹑湿度的监测,这属于控制系统的干扰因素
-
(2) “智能云平台课桌”控制系统的被控对象是( )A . 课桌 B . 台灯 C . LoRa主机 D . 用户
某校科技兴趣小组制作了人脸识别的门控系统,其基本工作过程是:安装在门框上的摄像头检测到人脸数据,并传输至树莓派主板,树莓派根据编写好的python程序语言进行分析、处理,与已存面部数据进行比较,若对比成功,则通过电机开门,否则蜂鸣器报警。下列关于该控制系统的分析正确的是( )
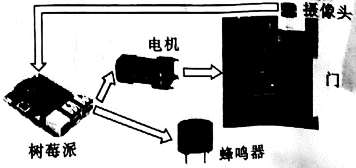
A . 摄像头是反馈装置的组成部分
B . 树莓派上的python程序语言是控制器
C . 门和蜂鸣器都作为系统的被控对象
D . 工作过程中存在比较,故控制方式为闭环
如图所示为数控机床,数字化机床控制系统的工作原理为:数控装置内的计算机把输入的零件信息传递给伺服系统,伺服系统向机床主轴及传动机构发出指令,机床主体则按照这些指令完成工件的加工。机床工作时,位移传感器会实时检测机床主体的位置,并将信息传递给数控装置,从而实现精准加工。下列关于该控制系统的说法正确的是( )

A . 被控对象是传动机构
B . 位移传感器通过反馈消除了干扰
C . 被控量是机床主体的位置
D . 控制量是输入的零件信息
如图为常见的四轴无人机,由机体、遥控信号传输系统、飞控系统、视频图像回传系统、电源系统等部分组成。飞控系统又称为飞行管理与控制系统,保障无人机飞行的稳定,对图像传输的可靠性、精确性、实时性等都有重要影响,对飞行起决定性作用;全球定位系统( GPS)精准校正飞行位置;遥控信号传输系统确保遥控指令传输的准确性;视频图像回传系统确保无人机发送图像信息的实时性和可靠性。请根据描述回答下列问题:

-
(1) 无人机飞行过程中因遥控信号太弱而面临失控时,GPS数据可以帮助其自动返回到起飞地点,GPS应该为系统的子系统(在“A .遥控信号传输系统;B .飞控系统;C .视频图像回传系统;D .电源系统”中选择,将序号填写在横线赴)。
-
(2) 设计无人机时要先保证机体的飞行功能,再考虑定点悬停、路线规划等其他功能,这体现了系统分析的原则。(在“A .整体性;B .科学性;C .综合性;D .相关性”中选择一项,将序号填写在横线处)。
-
(3) 为避免无人机在机场附近空域飞行而严重影响机场飞行安全,以下措施中:A .限制动力电池容量,把无人机飞行距离限制在一定范围之内;B .设定GPS参数,使无人机在禁飞范围内无法起飞;C .机场安装干扰无人机的信号设备,让无人机无法接收指令;D .在无人机中加装针对机场飞机的预警系统。其中最不可行的是(选择一项将序号填写在横线处)。
-
(4) 为使无人机能在离地面一定的高度附近稳定悬停,部分无人机配有气压定高控制装置,飞行控制器利用气压计测量空气压力,并与设定值进行对比,根据对比的结果相应地调整电机动力从而使无人机悬停于一定的高度附近,在该控制过程中,控制方式应该是(在A .开环控制;B .闭环控制中选择一项,将序号填写在横线处);这里的“设定值”应该是(在“A .无人机悬停的目标高度;B .无人机悬停的目标高度对应的气压值”中选择一项,将序号填写在横线处)。
-
(5) 起落架会自动收放,当高度检测装置检测到无人机飞行高度低于某一值时,控制单元控制伺服电机放下起落架;反之则收起起落架。起落架的收起或放下是该控制系统中的(在“A .输入量;B .控制量;C .输出量”中选择合适的一项,将序号填写在横线处)
2019年7月10日,全国首个在全市范围提供“先离场、后付费”便捷泊车的城市大脑停车系统在杭州上线。该系统有车位显示系统、管理软件系统、防盗系统、监视系统、电脑影像对比系统、收费系统、出口控制器、地感线圈、自动道闸、车辆感应器、通讯适配器、传输设备等组成。车位显示控制系统由车位检测器,车位显示屏,车场显示灯,车位提示灯,信号处理器组成。在每个车位设置一个检测器,通过信号处理器并入管理软件子系统后,车位显示屏将显示当前的最佳停车车位给司机,车位提示灯开启并闪亮,引导司机停车。若车库内已无车位使用,则车位显示屏显示没有空余车位,不再受理车辆进库。下面对车位显示控制系统的分析正确的是( )
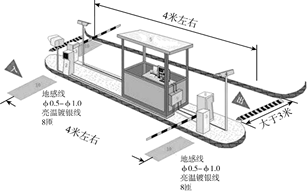
A . 进场车辆是被控对象
B . 输入量是进场车辆的信息
C . 输出量是车位显示屏上显示的车位信息
D . 该控制系统有反馈环节
自动扶梯在酒店、商场、地铁等公共场所应用较多,但扶梯常处于空载状态,浪费了大量的电能,也造成扶梯的磨损,为解决此问题,加装PLC拉制系统的节能扶梯就应运而生。在PLC控制器检测到扶梯空载运行一定时间后,发出指令控制变频器使扶梯降速运行;设置在入口处的光电感应装置感知顾客的到来并发出脉冲信号,当PLC控制器检测到脉冲信号时,就控制变频器使扶梯以正常速度行驶。根据以上材料回答以下四个小题。
-
(1) 上述扶梯的控制为( )A . 自动控制、闭环控制系统 B . 自动控制、开环控制系统 C . 手动控制、闭环控制系统 D . 手动控制、开环控制系统
-
(2) 目前电梯设计时利用变频技术,将工作中多余
 机械能转化成电能并用于驱动电动机,该优化措施的目标是( )
A . 降低系统能耗 B . 提高电梯升降速度 C . 延长电梯的使用寿命 D . 提高乘坐电梯的舒适性
机械能转化成电能并用于驱动电动机,该优化措施的目标是( )
A . 降低系统能耗 B . 提高电梯升降速度 C . 延长电梯的使用寿命 D . 提高乘坐电梯的舒适性 -
(3) 该控制系统中的输入量是( )A . 光电感应信号 B . 光线的强弱变化 C . 扶梯的运行速度 D . PLC发出的信号
-
(4) 要检测乘客到来的信号,除可用光电感应装置外,还可用( )A . 温度传感器 B . 压力传感器 C . 速度传感器 D . 湿度传感器
最近更新



