简单控制系统运行的主要干扰因素 知识点题库
小明设计了一款循迹机器人,工作原理是通过检测场地预设路线的光值来控制机器人行走。影响该机器人沿预设路线行走的因素有( )。

A . 室内温度
B . 室内湿度
C . 黑线的宽窄
D . 室内噪音
如图所示为纸浆浓度控制系统工作原理示意图,其工作原理是:控制器将传感器检测到的配浆浓度与设定值相比较,根据偏差值控制电动调节阀调节清水流量,从而使配浆浓度达到设定值。请根据上述说明,完成以下任务。

-
(1) 该系统的控制手段和控制方式分别属于和 (在“①手动控制;②自动控制;③开环控制;④闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 该控制系统的控制量是(在“①清水流量;②配浆流量;③原浆浓度;④配浆浓度”中选择合适的选项,将序号填入横线处);
-
(3) 该系统中的传感器应选用(在“①流量传感器;②湿度传感器;③温度传感器;④浓度传感器”中选择合适的选项,将序号填入横线处);
-
(4) 该控制系统的配浆浓度会受到各种干扰,以下因素中,不属于干扰因素的是 (在“①控制器故障;②清水管道压力大幅波动,③传感器失灵;④手动取样阀故障”中选择合适的选项,将序号填入横线处)。
如图所示是酒店用的洒水灭火喷头结构示意图,该喷水控制系统的工作原理是:当防护区发生火灾时,环境温度升高,玻璃球内的感温液体受热膨胀,如果达到设定的动作温度值,玻璃球就会爆破,于是密封件脱落,开启喷头洒水进行灭火。以下对该喷水控制系统中,描述正确的是( )

A . 玻璃球与感温液体组成的装置发出控制指令的作用
B . 达到设定的动作温度值,就会洒水灭火,所以为闭环控制系统
C . 玻璃球内的感温液体受外界环境热胀冷缩,所以该控制为液压控制
D . 喷头堵塞不属于该控制系统的干扰因素
如图所示为一款破壁料理机,破壁料理机由主机、杯体以及配用附件组成。采用杯体和主机分离的设计方式。其破壁过程为:当按下启动按钮,由控制主机控制超高速电机,带动不锈钢刀片,在杯体内对食材进行超高速切割和粉碎。

请完成以下任务:
-
(1) 该破壁控制的控制手段是,控制方式是(在①手动控制;②自动控制;③开环控制;④闭环控制中选择合适的选项,将序号填写在横线处);
-
(2) 该破壁控制的控制器是,执行器是(在①控制主机;②刀片;③食材中选择合适的选项,将序号填写在横线处);
-
(3) 以下属于该破壁控制干扰因素的是 和 (在①电机的负载转速;②刀片的数量、长度、厚度参数;③经由连接器传动到刀片的转速;④电路电压的变化;⑤异物卡住电机中选择合适的选项,将序号填写在横线处);
如图所示是学校文印室一体化速印机,印刷速度可达每分钟100张以上。在印刷过程中如进纸槽出现卡纸,卡纸传感器会将检测到的信号传递给控制系统,控制系统将通知电机使滚筒停止转动,从而达到停机目的。

-
(1) 根据示意图及描述,分析一体化速印机卡纸时的停机控制过程,在方框图中横线处填写相应的内容;

① ② ③ ④
-
(2) 一体化速印机印刷时间久了,卡纸传感器上面将有纸粉尘覆盖,会出现卡纸信号、停机故障现象,使一体机无法正常工作。下列措施不合理的是:(在①一体机要经常进行清理纸粉尘等维护工作;②提高卡纸传感器的灵敏度;③文印员要加强对一体机工作原理的学习,学会排除故障中选择一项,将序号填写在横线处);
-
(3) 一体机在设计时,设计师要充分考虑印刷过程中的卸版、扫描、制版、挂版、进纸、印刷、出纸等环节性能,其中有一环节出现故障,将会影响整个一体机速印功能的发挥。这体现了系统的(在①整体性;②动态性;③目的性中选择一项,将序号填写在横线处)。
如图所示的倒车雷达利用了超声波原理。超声波传感器探测汽车与障碍物的距离信号,将信号输入到微处理器,微处理器计算出汽车与障碍物间的实际距离,若到达危险距离,通过电子开关打开蜂鸣器发出警报,提醒驾驶员,使停车或倒车更容易、更安全。

-
(1) 根据上述描述,分析该系统的控制过程,在方框图中横线处填写相应的内容;

① ② ③ ④
-
(2) 倒车雷达突然出现故障,即使在开阔地,只要一打倒挡,蜂鸣器就报警。经检查,原来是车上安装的一台空气净化器产生了电磁波,这对控制系统来说属于;
-
(3) 设计的时候既要考虑到倒车雷达的性能,又要考虑到倒车雷达的价格,这体现了系统分析的(从①整体性原则;②科学性原则;③综合性原则中选择一项,将序号填写在横线处)。
无人驾驶汽车是智能汽车的一种,需要计算机系统与汽车系统的有机整合。其主要工作原理是:计算机系统根据用户选定的目的地自动规划行车路线,导航系统会实时检测行车路线是否偏移,通过计算机控制转向系统修正路线;行驶中利用车载传感器来感知车辆周围环境,计算机根据车载传感器所获得的道路、车辆位置和障碍物等信息,及时控制转向系统和制动系统,实现避让和超车,从而使车辆能够安全、可靠地在道路上行驶。据此回答下题。
-
(1) 关于无人驾驶汽车系统,下列说法错误的是( )A . 可分为导航子系统、计算机子系统、转向子系统和制动子系统等 B . 若计算机系统处理不及时会导致避让不及时而发生事故,体现了系统的动态性 C . 能适用于不同交通状况的道路,体现了系统的环境适应性 D . 设计时既要考虑性能可靠,又要兼顾成本等因素,体现了系统分析的综合性原则
-
(2) 关于无人驾驶汽车的工作原理,下列分析说法不正确的是( )A . 需要用户自己设置目的地,因此还不是自动控制 B . 无人驾驶汽车沿规划路线行驶的控制,可设计成闭环控制 C . 无人驾驶汽车避让和超车的控制,可设计成开环控制 D . 沿规划路线行驶过程中干扰因素包括其它车辆和障碍物
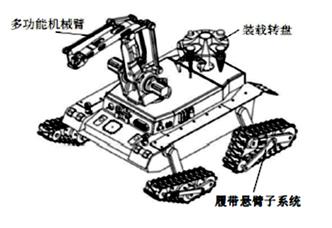
如图所示四履带月球车,由四履带移动系统、可分离检测系统和多功能机械臂系统等构成。行走在沙石地面时,履带悬臂子系统会抬起适当高度,保护车身;内部的检测机器人可从月球车分离,体型小巧,能探测月球车难以到达的区域;多功能机械臂由机械臂和装载转盘组成,转盘上载有机械爪、摄像头、铲斗和钻头四个构件,可实现挖掘、抓取、探测等工作。请完成问题。
-
(1) 从系统角度分析,下列对月球车的分析不正确的是( )A . 当机械臂出现问题时,月球车不能实现挖掘、抓取、探测等功能,体现系统的整体性 B . 履带悬臂子系统根据沙石地面情况抬升月球车高度,体现该子系统的目的性 C . 优先使用机械臂探测,难以探测时改用检测机器人探测,体现系统分析的综合性原则 D . 月球车上设备的空间分布、各部分的重量等都是系统优化的影响因素
-
(2) 月球车检测到研究对象时,控制台发出指令,电机运转,机械臂与装载转盘旋转后对齐,以便更换构件。以下关于该控制系统的描述,说法正确的是( )A . 控制台输出的信号是控制量 B . 机械臂与装载转盘是被控对象 C . 该控制过程存在反馈 D . 检测到研究对象的信号属于干扰因素
如图是一个蒸汽加热的热水槽,冷水流入到水槽内,通过槽内蛇形盘管进行加热,加热后的热水流热水槽。如果冷水流量加大,水槽内的温度下降,蒸汽阀开大,加大蒸汽的流量,冷水流量变小,加热槽水温上升,蒸汽阀门关小,蒸汽流量变小。控制加热槽内的温度稳定。


-
(1) 请补充完整蒸汽加热水槽自动控制系统方框图。
① ② ③ ④
-
(2) 水温检测仪将检测到的水温信号传送给TC装置与输入端信号进行比较的过程称为;
-
(3) 由于水中杂质在水温检测器上的沉淀,致使水温经常性发生偏差,这种设定状态以外的变化因素称为。
【案例与设计分析】
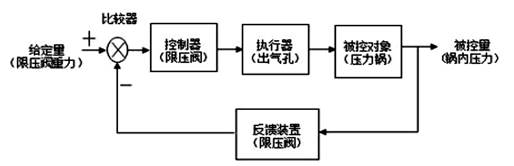
传统家用压力锅由锅身、锅盖、出气孔、限压阀、密封胶圈等部件组成,煮饭的控制过程可以用下图所示的控制框图表示。请按要求完成以下题目:
-
(1) 如果把压力锅看作一个系统,下列说法不正确(A .限压阀既是系统的控制器又是反馈装置;B .限压阀可看作压力锅系统的一个子系统;C .没有密封胶圈压力锅不能发挥正常作用;D .出气孔因减小锅内压力而形成系统干扰)
-
(2) 下面对压力锅控制系统的判断,正确的是(A .自动、开环控制;B .自动、闭环控制;C .手动、开环控制;D .手动、闭环控制)
-
(3) 下图所示的新款家用压力锅增加了防堵罩、报警阀、安全阀等装置,并美化了压力锅造型,其中不是出于安全考虑的设计是(A .增加防堵罩;B .增加安全阀;C .增加报警阀;D .造型的美化)。

-
(4) 压力锅系统不能正常工作,干扰因素不会是(A .出气孔被堵塞;B .锅内水中未放盐; C .未使用密封圈;D .锅盖手柄未锁住)。
如果将某人通过电话叫对方干某事的过程,看成是一个控制,那么线路中的噪声及通话环境的嘈杂声,可以称作是控制环节中的( )。
A . 给定值
B . 被控对象
C . 被控量
D . 干扰
小明设计了简易自动升旗控制系统,根据国歌的时间设定好电子定时器的定时时间,播放国歌时人工启动电子定时器,电动机开始转动并带动滑轮运动,使国旗匀速上升。当定时器计时停止时,电机停止转动,国旗正好升至杆顶。下列关于该自动升旗控制系统的说法不正确的是( )
A . 该控制系统的控制方式属于开环控制系统
B . 风的阻力变化属于该控制系统的干扰因素
C . 输入量是定时器设定的时间
D . 被控对象是电机
如图所示是简易旋转倒立摆控制系统示意图。该控制系统可以使摆杆保持竖直倒立状态,其工作原理是:设定摆杆处于竖直倒立状态时精密电位器输出的电压值,当摆杆由于外界作用力破坏其稳定性向一侧倒下时,精密电位器的阻值变化,从而改变了输出电压,并将信息传送到单片机与设定值进行比较,单片机榆出控制信号,通过驱动电路控制电机的转速和转向,带动旋臂水平转动,使摆杆重新保持竖直倒立状态。请根据描述,回答下面小题。

-
(1) 从系统的角度分析,下列说法不恰当的是( )A . 摆杆保持竖直倒立状态是该系统的控制目的 B . 精密电位器长时间使用后,其精度下降,体现了系统的动态性 C . 单片机根据比较差值,计算出旋臂所需的摆动速度,体现了系统分析的科学性原则 D . 精密电位器的精度是该系统优化的影响因素
-
(2) 下列关于该控制系统分析不正确的是( )A . 控制量是旋臂的转速和转向 B . 电机运行产生的振动不属于干扰因素 C . 驱动电路和电机属于执行器 D . 精密电位器输出的信号属于系统的反馈信号
如图所示是大型体育运动会升旗控制系统示意图,图中控制电脑输出音频信号奏起国歌的同时也输出控制信号给继电器,继电器工作,电动机带动卷扬机转动,旗杆向上升。当国歌结束,控制信号消失,旗杆刚好升到顶部停住。请回答下列问题

-
(1) 该控制系统的被控对象是(在A .卷扬机:B .电动机:C .电脑:D .旗杆中选择合适的选项,将序号填入横线处):
-
(2) 该控制系统的控制方式是 (在A .自动控制:B .人工控制:C .开环控制:D .团环控制中选择合适的选项,将序号填入横线处);
-
(3) 在升旗时,下列不属于干扰因素的是(在A .电压的波动:B .刮风:C .不同的国歌时间不同:D .卷扬机的性能中选择合适的选项,将序号填入横线处):
-
(4) 如果电动机或卷扬机损坏,升旗就无法完成,体现了系统的,卷扬机的选择必须要和电动机的功率匹配,体现了系统的(在A .相关性;B .动态性:C .整体性:D .环境适应性中选择合适的选项,将序号填入横线处)
-
(5) 使用一段时间后发现通电后不能升旗,用多用电表检测时发现电动机工作电压正常,拆下电动机再次检测发现电动机两接线间的电阻100左有,于是断定电动机坏了。小明判断故障的方法采用的是(在A .功能模拟法:B .黑箱法:中选择合适的选项,将序号填入横线处):
长沙近2000辆公交车完成了智能化、网联化改造,经过改造升级的公交车具有路口红绿灯显示、自动统计乘客人数、规范司机驾驶行为、提升安全等功能。其中路口红绿灯显示功能的工作原理如下:公交车行驶至某一路口,由计算机控制中心根据定位,通过交通信息中心的路口信息网络进行联系,将路口信号灯信息在车后显示屏上显示出来,大大方便了后方车辆的行驶与安全。关于红绿灯信息显示系统,以下分析正确的是( )
A . 该系统的控制方式为闭环控制
B . 被控对象为公交车
C . 输出量为显示屏中的路灯指示信息
D . 不同路口的路灯信息是影响该系统的干扰因素
非接触式的红外测温仪可以在移动状态下快速、准确、及时检测并筛查出非正常体温,成为判断是否感染肺炎的关键指标。红外测温仪是由光学系统、光电探测器、信号放大器及信号处理、显示输出等部分组成。其中光学系统中的菲涅尔光学透镜可以使得接收到的红外信号以忽强忽弱的脉冲形式输入。其工作原理是:人体的红外辐射热像信号经过光学接收器传输给调制器,在消除大面积的背景干扰信号后,将红外辐射的热像信号转变成电信号,再经过放大器和信号处理,并按照仪器内设的算法和目标发射率校正后,最终转变为被测目标的温度值。完成下面小题。
-
(1) 关于该红外线测温仪,从系统的角度分析,下列说法正确的是( )A . 分析红外线测温仪发现其融合了光学,电子技术等技术,体现了系统分析的综合性原则 B . 设计该测温仪时,既要考虑仪器的精确程度又要考虑测温仪的生产成本,体现了系统分析的整体性原则 C . 人体的红外辐射的热像信号是该系统的优化目标 D . 光学系统中镜片的选择属于影响系统优化的因素
-
(2) 关于该红外线检测控制系统,下列说法合理的是( )A . 该系统属于自动、闭环控制 B . 控制器是放大器和信号处理部分 C . 控制量是屏幕显示的温度 D . 该系统可消除大面积的背景干扰信号,故外界环境等热辐射不属于该系统的干扰因素
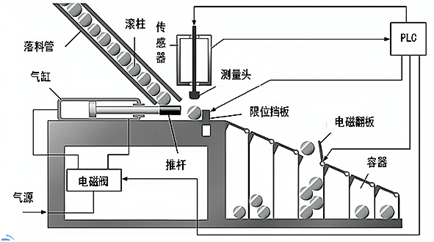
如图所示为钢制滚柱自动分选控制系统,其工作过程:PLC控制气缸使推杆运动,推动滚柱至测量位置,传感器测量头下移压住滚柱进行直径测量;PLC根据测定的直径值控制相应容器的电磁翻板开启,并使限位挡板下移,推杆推动滚柱落入容器中。请根据示意图和描述.完成以下任务。
-
(1) 该系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 系统设计时,需要对气缸、电磁翻板等的工作参数进行计算和反复调试,体现了系统分析的(在“A .整体性原则;B .科学性原则;C .综合性原则”中选择合适的选项.将序号填入横线处);
-
(3) 下列不属于该控制系统干扰因素的是(在“A .滚柱直径的变化;B .测量头的磨损;C .PLC输出信号异常”中选择合适的选项,将序号填入横线处);
-
(4) 小明设计了四种结构的电磁翻板盖,其中合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A .
 B .
B .  C .
C .  D .
D . 
-
(5) 为防止电磁翻板盖生锈,下列表面处理方法中合理的是(在“A .锉削;B .电镀;C .砂纸打磨”中选择合适的选项,将序号填入横线处)。
水塔水位控制系统一般用于家庭、机关单位、消防、学校、工厂等的水塔上进行自动控制水位,一般要求能实现无人值守,缺水自动补水,水满能自动停止进水。以下是小明设计的水位控制系统示意图,其工作过程如下:超声波探测装置产生的高频脉冲能穿过液体,并能被容器内表面反射回来。反射回来的信号被超声波探测装置接收后,传输给声波分析仪。声波分析仪通过对这个反射波的分析和计算,就可以判断出液位是否达到了预设的位置,继而输出控制信号给进水阀门,从而完成对液位的监控。请完成以下小题:

-
(1) 该水位控制系统的控制方式为,控制手段为(在A .手动控制:B .自动控制:C .开环控制:D .闭环控制中选择合适的序号,填入横线中);
-
(2) 干扰因素广泛存在于各种控制行为当中,以下不属于该水位控制系统干扰因素的是 ;A . 供电电网电压波动 B . 用户正常用水 C . 外界相近频率超声波信号 D . 调整探测装置安装高度
-
(3) 在设计该系统时,分析仪、电磁阀等元件应选择工作状态可靠的,但这样往往又会使设计预算超支,究竟选择什么样的元件比较头疼,这时候我们应考虑运用系统分析的 、。(在A .经济性原则:B .整体性原则;C .综合性原则;D .科学性原则中选择合适的选项,填入横线中)。题中所指“预算”在该系统设计优化中属 (在A .影响因素;B .限制因素:C .约束条件中选择合适的选项,填入横线中)。
恒温式燃气热水器的温度控制系统为闭环控制。下列因素中,不属于该温度控制系统干扰因素的是( )
A . 燃气的流量
B . 进水的流量
C . 进水的温度
D . 出水的温度
在电冰箱温度控制中不属于干扰因素的是( )
A . 打开冰箱门
B . 把食物放到冰箱内
C . 冰箱旁放了盆水
D . 房间温度变化很大
最近更新



