功能模拟方法和黑箱方法 知识点题库
人们往往通过看、听、拍等一系列动作来判断西瓜的生熟,他们所采用的方法是( )
A . 功能模拟法
B . 功能法
C . 黑箱方法
D . 模拟法
下列事例中,属于黑箱方法的是( )
A . 象棋对弈
B . 买西瓜通过“看形,看色,听声,测弹性”判断生熟
C . 医疗中运用CT技术对病变部位进行检查
D . 中医看病通过“望、闻、问、切”诊断病情
如图所示为某款wifi控制的智能炖锅,该炖锅能按照烹饪程序在各个时间段以不同的温度工作。炖锅上配有温度传感器,手机通过wifi获取炖锅的温度,根据所获取的温度与设定值比较,再自动发送打开或关闭加热器的命令,从而实现炖锅加热时长和恒温控制。用户还可以下载各种菜肴的烹饪程序,通过手机实时监控炖锅温度。

-
(1) 炖菜过程中的一个环节可视为恒温控制过程,该控制系统的检测装置与被控量分别是、(在横线处填写相应的内容)。
-
(2) 手机定时向炖锅发送改变温度命令,实现分时段不同温度加热的控制,这种手机代替人实时调节和管理炖锅的温度的方法是(在①黑箱方法;②功能模拟法;③反馈方法 中选择一项,将序号填写在横线处)。
-
(3) 炖锅加热过程中若wifi网络中断,炖锅持续加热可能会造成灾难,以下改进措施中最合理的是(①一旦断开网络,炖锅立即停止加热;②炖锅未接到改变温度信号就一直处于同一恒温控制;③一旦wifi信号中断,炖锅按照手机上传的烹饪程序自动完成各环节恒温控制 中选择一项,将序号填写在横线处)。
电脑机箱内往往有一个鸣音器,如图所示,使用者可以通过开机时鸣音器发出的声音来判断电脑是否产生了故障,产生了什么故障,这种诊断的方法属于( )
A . 黑箱方法
B . 功能模拟法
C . 辩声法
D . 虚拟试验法
下列选项中不属于黑箱方法的是( )
A . 国际象棋中的人机对弈
B . 用万用表去测试一段电路是否断路
C . 中医看病的“望闻问切”
D . 通过拍打西瓜表面来判断西瓜成熟情况
为了测量集成电路芯片好坏,可以采用电压测量法:先给集成电路接上工作电压,然后测出各引脚对地的电压值,依此来判断集成电路的好坏。这种方法是( )
A . 黑箱方法
B . 移植方法
C . 虚拟方法
D . 功能模拟法
回答下列问题
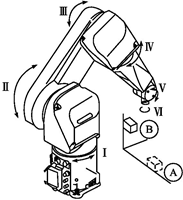
图1 实物图
-
(1) 如图实物图所示,工程师恩格尔伯格(Joseph Engelberger)与机械运动学、人体解剖学和计算机等领域的专家组建团队,共同研发了世界上第一台工业机器人,体现技术的创新性,也体现技术性质。该团队在研发该产品时采用了(①综合性;②两面性;③专利性;④功能模拟法;⑤黑箱方法,从上述选项中选一项,将序号填入横线中)。
-
(2) 如图系统示意图所示,为将一个物体从A移到B位置,需要一个庞大系统来实现,从系统分析综合性原则考虑,首先要解决(①回转伺服控制器;②视觉系统;③控制计算机;④通讯协议;⑤滑觉与力觉传感器,从上述选项中选一项,将序号填入横线中)。

图2 系统示意图
-
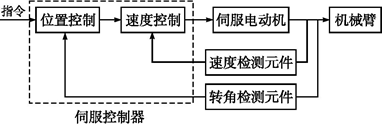
(3) 如图1实物图所示,Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ是为完成转动的伺服电动机。其中一个机械臂控制系统如图所示,该闭环控制系统的被控对象是,执行器是,从控制计算机接收到的指令的含义是(①机械臂;②伺服电动机;③伺服电动机的速度;④伺服电动机的转动位置;⑤机械臂的位置;⑥伺服电动机的转动的速度,从上述选项中分别选一项,将序号填入横线中)。
下列方法中,不属于黑箱方法的是( )
A . 用仪器测试集成电路输出信号判断集成电路的功能
B . 通过脑电波检查诊断病人大脑的状况
C . 列车司机用锤子敲击车轮,通过声音判断有无故障
D . 通过胃镜检查诊断病人的胃部疾病
下列方法中不正确黑箱方法的是( )
A . 用仪器测试集成电路输出信号判断集成电路的功能
B . 通过脑电波检查诊断病人大脑的状况
C . 列车司机用锤子敲击车轮,通过声音判断有无故障
D . 通过胃镜检查诊断病人的胃部疾病
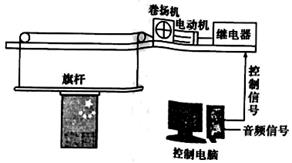
如图所示是体育馆升旗控制系统示意图图中控制电脑输出音频信号奏起国歌的同时也输出控制信号给继电器,继电器工作,电动机带动卷扬机转动,旗杆向上升。当国歌结束,控制信号消失,旗杆刚好升到顶部停住。下列关于该控制系统的说法正确的是( )
A . 该控制系统的被控对象是卷扬机
B . 该控制系统的控制量是旗杆的升降
C . 电动机电源电压的波动是该控制系统的干扰因素
D . 该系统的设计模拟了人的功能和行为,是黑箱方法的应用
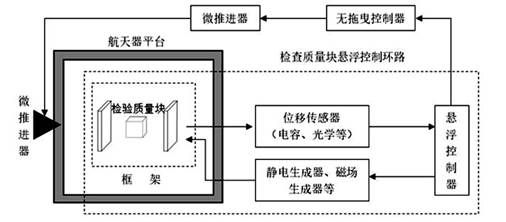
如图所示是无拖曳航天器控制系统,该系统主要由检查质量块悬浮控制环路、无拖曳控制器、微推进器和航天器平台等模块组成,其中检查质量块悬浮控制环路可以保持检验质量
处于框架的中心位置,同时能高精度获取航天器平台和检验质量块之间的位置偏差,并传输
给无拖曳控制器,微推进器产生推力,保证航天器平台以检验质量块为中心。该系统可以减
小航天器受宇宙环境扰动的影响,确保超稳的实验环境。请完成问题。
-
(1) 从系统的角度分析,下列说法不恰当的是( )A . 检查质量块悬浮控制环路可以看作是无拖曳航天器系统的一个子系统 B . 微推进器产生的推力大小及方向由航天器平台和检验质量块之间的位置偏差确定,体现了系统的相关性 C . 检查质量块悬浮控制环路可以测量计算航天器和检验质量块之间的位置偏差,并将信息传递给无拖曳控制器,体现了系统分析的科学性原则 D . 宇宙环境属于该系统优化的约束条件
-
(2) 下列关于无拖曳航天器控制系统说法合理的是 ( )A . 被控对象是航天器平台,控制量是微推进器产生的推力大小 B . 该控制系统属于自动、开环控制 C . 由于该系统可以抵消太空环境对航天器平台的扰动力,所以太阳光压等宇宙环境因素不属于该系统的干扰因素 D . 研究检验质量块悬浮控制环路时,要逐个分析位移传感器、悬浮控制器等要素的功能,采用了黑箱方法
下列有关控制系统的说法中,不正确的是( )
A . 反馈的作用的是为了克服干扰因素
B . 引起输出量变化的因素,称之为干扰因素
C . 闭环控制系统存在反馈,开环控制系统不存在反馈
D . 黑箱方法主要是研究系统的输出与输入之间的关系
传统的转炉电气控制系统普遍采用继电器控制技术,由于采用固定接线的硬件实现逻辑控制,使控制系统的体积增大、耗电多、效率不高且易出故障,不能保证正常的工业生产。随着计算机控制技术的发展,PLC控制的温度控制系统具有经济、高效、稳定且维护方便等优点,传统继电器控制技术被PLC控制技术所取代。转炉温度控制系统基本构成如图1所示,它是由PLC主控系统、转换器模块、整流器SCR、加热炉、传感器等5个部分组成。转炉温度控制实现过程:首先传感器将转炉的温度转化为电压信号,PLC主控系统系统内部的A/D转换器把电压信号转化为PLC可识别的信号,然后PLC将系统给定的温度值与反馈回来的温度值进行处理,经过D/A转换器,再给整流器SCR一个触发信号,通过SCR的输出实现转炉温度的控制。根据转炉温度控制要求,本系统控制流程图如图2所示。
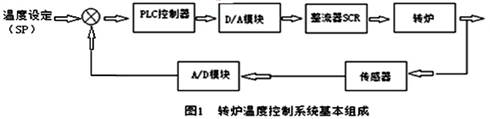
请根据示意图及其描述完成问题。
-
(1) 下列关于转炉控制流程(图2)分析中正确的是( )
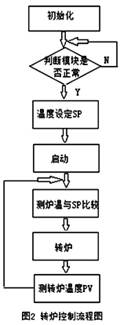 A . 系统中每个设备完成的工作都是流程中的环节 B . 判断模块是否正常环节可以省去 C . 该流程采用文字表达方式 D . 启动与温度设定 SP 之间的时序可以颠倒
A . 系统中每个设备完成的工作都是流程中的环节 B . 判断模块是否正常环节可以省去 C . 该流程采用文字表达方式 D . 启动与温度设定 SP 之间的时序可以颠倒 -
(2) 从系统的角度分析,下列说法中不恰当的是( )A . 该系统可分为温度检测和信号转换等子系统 B . 各子系统单独工作,都不能实现转炉温度控制功能,体现了系统的整体性 C . 设计该系统时,要从整体出发,以系统整体功能最优为目标 D . 设计该系统时,既要考虑成本,又要考虑维护方便,体现了系统分 析的科学性原则
-
(3) 下列关于该控制系统的分析中不正确的是( )A . 该控制系统的被控量(输出量)是转炉的实际温度 B . 该电子控制系统的输出部分是整流器SCR C . 功能模拟法是通过对系统输入与输出关系的研究,进而推断出系统内部结构及其功能的方法 D . 转炉温度控制系统属于闭环控制系统
-
(4) 下列关于信号获取与转换分析正确的是( )A . 转换器模块中,A/D 模块是数模转换器,D/A 模块是模数转换器 B . 传感器可以获得外界的输入信息,并将非电量信息转换成电信号输出 C . 电子电路中能处理的信号只有数字信号 D . 热敏电阻是一种用半导体材料制成的电阻值随温度的上升而减小的特殊电阻
如图所示是一加热炉的恒温自动控制示意图。以下关于该控制系统说法正确的是( )
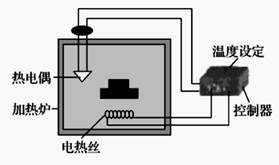
A . 该控制系统的设计模拟了人的功能和行为,这种研究方法是黑箱方法
B . 电热丝在控制系统中的作用是检测温度并反馈
C . 调低设定温度或炉体隔热性能不好会导致炉内温度降低,都是该控制系统的干扰因素
D . 在加热炉工作时,如果炉内温度大大超过了设定值,可能原因是控制器损坏
下列选项中不属于黑箱方法的是:( )。
A . 通过拍打西瓜表面来判断西瓜成熟情况
B . 国际象棋中的人机对弈
C . 用万用表去测试一段电路是否断路
D . 中医看病的“望、闻、问、切”
中医通过“望、闻、问、切”来了解病人的病况,该诊断方法属于功能模拟方法。
示波器是常用的电路检测仪器。电路修理师傅为了判断电视机内部故障,通常通过示波器显示的波形来判断故障。该诊断方法属于( )
A . 黑箱方法
B . 功能模拟法
C . 干扰法
D . 虚拟试验法
材料拉伸试验机的设计目的是测量力和形变。请你画出其设计总功能的黑箱图及总功能的分解图。
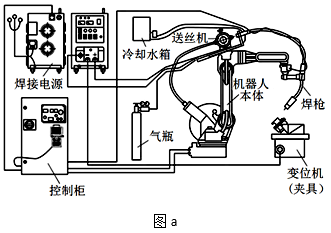
如图a所示为焊接机器人系统,主要包括控制柜、机器人本体及焊接设备三部分。焊接机器人的基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。之后机器人可以准确地按示教动作完成操作任务。请根据示意图和描述,完成以下任务。
-
(1) 焊接机器人可以通过示教掌握焊接操作,能完成工件上需要的焊接任务,该系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 设计焊接机器人时,应该先设定总体要求,然后分成控制柜、机器人本体及焊接设备几部分分别进行设计,体现了系统分析的(在“A .整体性原则;B .科学性原则;C .综合性原则”中选择合适的选项,将序号填入横线处);
-
(3) 焊接机器人在实际操作中出现了焊缝偏移,下列不属于该控制系统干扰因素的是(在“A .工作电压不稳定;B .示教时不够精确;C .变位机动作有偏差”中选择合适的选项,将序号填入横线处);
-
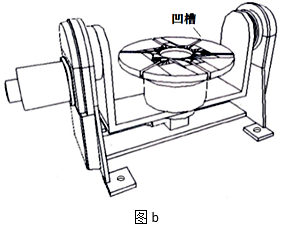
(4) 为了使焊接的方位更灵活,除了机械手末端(焊枪)能转动之外,放置被焊工件的平台也会转动,这样的平台称为变位机。如图b所示是一种变位机,根据示意图,被焊机件放在工作台上不可以实现(在“A .水平旋转;B .竖直旋转;C .在倾斜面上旋转;D .水平移动”中选择合适的选项,将序号填入横线处);
-
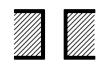
(5) 变位机圆形平台上设计的凹槽是为了利用螺帽和螺栓固定夹具(夹持被焊工件),以下是四种凹槽结构的横截面示意图,其中不合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A .
 B .
B .  C .
C . 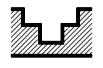 D .
D . 
-
(6) 焊接机器人可以准确地按示教动作完成焊接任务,运用了控制中的方法。(在“A .系统分析;B .黑箱;C .功能模拟;D .虚拟试验”中选择合适的选项,将序号填入横线处);
2018年春节前夕,在宝鸡市行政中心广场,举办了智能机器人和书法家同台义务书写春联活动。该智能机器人在设计时采用了( )
A . 反馈法
B . 系统优化法
C . 功能模拟方法
D . 黑箱方法
最近更新



