动量定理 知识点题库
如图所示,轻弹簧的一端固定在竖直墙上,质量为m的光滑弧形槽静止放在光滑水平面上,弧形槽底端与水平面相切,一个质量也为m的小物块从槽高h处开始自由下滑,下列说法正确的是( )
A . 在下滑过程中,物块的机械能守恒
B . 在下滑过程中,物块和槽的动量守恒
C . 物块被弹簧反弹后,做匀速直线运动
D . 物块被弹簧反弹后,能回到槽高h处
如图所示,光滑固定斜面倾角θ=30°,一轻质弹簧底端固定,上端与M=3kg的物体B相连,初始时B静止,A物体质量m=1kg,在斜面上距B物体S1=10cm处由静止释放,A物体下滑过程中与B发生碰撞,碰撞时间极短,碰撞后粘在一起,已知碰后AB经t=0.2s下滑S2=5cm至最低点,弹簧始终处于弹性限度内,A、B可视为质点,g取10m/s2 , 求:

-
(1) 从碰后到最低点的过程中弹性势能的增加量
-
(2) 从碰后至返回到碰撞点的过程中,弹簧对物体B冲量的大小.
如图所示,物体A和B用轻质弹簧连接,悬于绳下静止不动,A和B的质量都是M,现将悬绳剪断,两物体开始下落连接它们弹簧的长度将发生变化,当弹簧的长度为原长时,A速度为v,B的速度为u,则( )
![]()
A . v<u
B . 这段时间里,弹簧的弹力对A的冲量等于Mv
C . 这段时间里,B的重力对B的冲量大于Mu
D . 这段时间里,A受到的合冲量小于B受到的合冲量
排球运动是一项同学们喜欢的体育运动.为了了解排球的某些性能,某同学让排球从距地面高h1=1.8m处自由落下,测出该排球从开始下落到第一次反弹到最高点所用时间为t=1.4s,第一次反弹的高度为h2=1.25m.已知排球的质量为m=0.5kg,g取10m/s2 , 不计空气阻力.求:
-
(1) 排球与地面的作用时间.
-
(2) 排球对地面的平均作用力的大小.
如图所示,竖直虚线OP右侧有范围足够大的水平匀强磁场,质量为m、电阻为R的矩形线框abcd在竖直面内,ab=cd=L,ad=bc=2L,其ab边从靠近虚线OP处以大小为v0的水平速度进入磁场,当ab边进入磁场水平位移大小为L时,线框的加速度大小恰好为g,g为重力加速度,运动过程中线框ad边始终水平,则( )

A . 磁场磁感应强度大小为  B . 该过程中通过cd边的电荷量为
B . 该过程中通过cd边的电荷量为  C . 该过程中线框产生的焦耳热为
C . 该过程中线框产生的焦耳热为  D . 该过程中线框产生的焦耳热为mgL
D . 该过程中线框产生的焦耳热为mgL
B . 该过程中通过cd边的电荷量为
C . 该过程中线框产生的焦耳热为
D . 该过程中线框产生的焦耳热为mgL
如图所示,质量为m的小球套在倾斜放置的固定光滑杆上,一根轻质弹簧一端固定于O点另一端与小球相连,弹簧与杆在同一竖直平面内,将小球沿杆拉到弹簧水平位置由静止释放,小球沿杆下滑,当弹簧位于竖直位置时,小球速度恰好为零,此时小球下降的竖直高度为h,若全过程中弹簧始终处于伸长状态且处于弹性限度范围内,下列说法正确的是( )

A . 弹簧与杆垂直时,小球速度最大
B . 弹簧与杆垂直时,小球的动能与重力势能之和最大
C . 小球下滑至最低点的过程中,合外力的冲量为零
D . 小球下滑至最低点的过程中,弹簧的弹性势能增加量等于mgh
如图所示,在小车内固定一光滑的斜面体,倾角为θ,一轻绳的一端连在位于斜面体上方的固定木板B上,另一端拴一个质量为m的物块A,绳与斜面平行。整个系统由静止开始向右匀加速运动。物块A恰好不脱离斜面,则向右加速运动时间为t的过程中( )

A . 小车速度的变化量△v=  B . 物块重力所做的功和重力的冲量均为零
C . 拉力冲量大小I=
B . 物块重力所做的功和重力的冲量均为零
C . 拉力冲量大小I=  D . 拉力做功W=
D . 拉力做功W= 
B . 物块重力所做的功和重力的冲量均为零
C . 拉力冲量大小I=
D . 拉力做功W=
灌浆机可以将涂料以速度v持续喷在墙壁上,涂料打在墙壁上后完全附着在墙壁上。涂料的密度为  ,墙壁上涂料厚度每秒增加u,不计涂料重力的作用,则喷涂料对墙产生的压强为( )
,墙壁上涂料厚度每秒增加u,不计涂料重力的作用,则喷涂料对墙产生的压强为( )
,墙壁上涂料厚度每秒增加u,不计涂料重力的作用,则喷涂料对墙产生的压强为( )
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
某物业公司的宣传提醒牌。从提供的信息知:一枚60g的鸡蛋从 17楼(离地面安全帽为 45m高)落下,能砸破安全帽。若鸡蛋壳与安全帽的作用时间为6×10-4s,人的质量为52kg,重力加速度 g 取 10 m/s2 , 求安全帽受到的平均冲击力的大小。(结果保留小数点后一位)

如图所示,  是两条水平放置的阻值可忽略的平行金属导轨,导轨间距为
是两条水平放置的阻值可忽略的平行金属导轨,导轨间距为  ,在水平导轨的左侧存在磁感应强度方向垂直导轨平面向上的匀强磁场,磁感应强度大小为
,在水平导轨的左侧存在磁感应强度方向垂直导轨平面向上的匀强磁场,磁感应强度大小为  ,磁场区域的宽度为
,磁场区域的宽度为  ,导轨的右端接有一阻值为
,导轨的右端接有一阻值为  的电阻,左端与一弯曲的光滑轨道平滑连接。将一阻值为 、质量为
的电阻,左端与一弯曲的光滑轨道平滑连接。将一阻值为 、质量为  的导体棒从弯曲轨道上
的导体棒从弯曲轨道上  高处由静止释放,导体棒与水平导轨接触良好,且动摩擦因数为
高处由静止释放,导体棒与水平导轨接触良好,且动摩擦因数为  ,导体棒最终恰好停在磁场的右边界处。求:
,导体棒最终恰好停在磁场的右边界处。求:
是两条水平放置的阻值可忽略的平行金属导轨,导轨间距为 ,在水平导轨的左侧存在磁感应强度方向垂直导轨平面向上的匀强磁场,磁感应强度大小为 ,磁场区域的宽度为 ,导轨的右端接有一阻值为 的电阻,左端与一弯曲的光滑轨道平滑连接。将一阻值为 、质量为 的导体棒从弯曲轨道上 高处由静止释放,导体棒与水平导轨接触良好,且动摩擦因数为 ,导体棒最终恰好停在磁场的右边界处。求: 
-
(1) 通过电阻 的最大电流;
-
(2) 导体棒在磁场中运动的时间。
如图所示,光滑水平面上静止放着长L=1.6 m,质量为M=3 kg的木板(厚度不计),一个质量为m=1 kg的物块放在木板的最右端,m和M之间的动摩擦因数μ=0.1,今对木板施加一水平向右的拉力F,最大静摩擦力等于滑动摩擦力.(g取10 m/s2)
![]()
-
(1) 为使物块与木板不发生相对滑动,拉力F应满足什么条件?
-
(2) 如果拉力恒定为F=10 N,为使物块不从木板上滑下,求拉力的最长作用时间?
一质量为2kg的物块在合力F的作用下从静止开始沿直线运动,合力F随时间t变化的关系图像如图所示,则( )

A . t=2s时,物块的动量大小为0
B . t=3s时,物块的速率为1m/s
C . t=0到t=1s时间内,合力F对物块冲量的大小为1N·s
D . t=2s到t=3s时间内,物块动量变化量的大小为2kg·m/s
如图所示,水平桌面上固定着两根足够长的平行导槽,质量为2m的U形管恰好能在两导槽之间自由滑动,一质量为m的小球沿水平方向,初速度v0从U形管的一端射入,从另一端射出。已知小球的半径略小于管道半径,不计一切摩擦。

-
(1) 小球从U形管的另一端射出时的速度大小;
-
(2) 从小球射入至射出U形管的过程中,U形管受到的冲量大小。
-
(3) 小球运动到U形管圆弧部分最左端时的速度大小;
运输家用电器、易碎器件等物品时,经常用泡沫塑料作填充物,这是为了在运输过程中 ( )
A . 减小物品受到的冲量
B . 使物品的动量减小
C . 使物品的动量变化量减小
D . 使物品的动量变化率减小
如图所示,间距为L的平行光滑导轨由一段水平导轨和一段倾斜导轨组成,两者之间平滑连接,水平导轨足够长,倾角为 的倾斜导轨顶端连接有一个阻值为R的定值电阻。在水平导轨的右侧,有一个间距为
的倾斜导轨顶端连接有一个阻值为R的定值电阻。在水平导轨的右侧,有一个间距为 的水平导轨与之连接。质量为m、长度为L、电阻为R的金属杆a垂直倾斜导轨跨放在倾斜导轨上,在水平导轨右端有一与金属杆a完全相同的金属杆b,在b的右侧有两个小立柱挡住b。在倾斜导轨区域加一垂直导轨平面向下、磁感应强度大小为B的匀强磁场;在水平导轨区域加另一垂直导轨平面向下、磁感应强度大小也为B的匀强磁场。闭合开关,让金属杆a从图示位置由静止释放,已知金属杆运动到水平导轨前,已经达到最大速度,金属杆a恰好到达水平轨道时,断开开关,同时撤去金属杆b右侧的立柱。不计导轨电阻,金属杆始终与导轨接触良好,重力加速度为g。
的水平导轨与之连接。质量为m、长度为L、电阻为R的金属杆a垂直倾斜导轨跨放在倾斜导轨上,在水平导轨右端有一与金属杆a完全相同的金属杆b,在b的右侧有两个小立柱挡住b。在倾斜导轨区域加一垂直导轨平面向下、磁感应强度大小为B的匀强磁场;在水平导轨区域加另一垂直导轨平面向下、磁感应强度大小也为B的匀强磁场。闭合开关,让金属杆a从图示位置由静止释放,已知金属杆运动到水平导轨前,已经达到最大速度,金属杆a恰好到达水平轨道时,断开开关,同时撤去金属杆b右侧的立柱。不计导轨电阻,金属杆始终与导轨接触良好,重力加速度为g。
的倾斜导轨顶端连接有一个阻值为R的定值电阻。在水平导轨的右侧,有一个间距为的水平导轨与之连接。质量为m、长度为L、电阻为R的金属杆a垂直倾斜导轨跨放在倾斜导轨上,在水平导轨右端有一与金属杆a完全相同的金属杆b,在b的右侧有两个小立柱挡住b。在倾斜导轨区域加一垂直导轨平面向下、磁感应强度大小为B的匀强磁场;在水平导轨区域加另一垂直导轨平面向下、磁感应强度大小也为B的匀强磁场。闭合开关,让金属杆a从图示位置由静止释放,已知金属杆运动到水平导轨前,已经达到最大速度,金属杆a恰好到达水平轨道时,断开开关,同时撤去金属杆b右侧的立柱。不计导轨电阻,金属杆始终与导轨接触良好,重力加速度为g。
-
(1) 求金属杆a在倾斜导轨上滑行的最大速率
 ;
;
-
(2) 金属杆a在倾斜导轨上运动距离
 时速度为
时速度为 , 求在这个过程中定值电阻R上产生的焦耳热Q;
, 求在这个过程中定值电阻R上产生的焦耳热Q;
-
(3) 求撤去立柱后金属杆b的最大速度。
如图所示,某同学正在练习颠球。某次球从静止自由下落45cm后被重新顶起,离开头部后竖直上升的最大高度达到80cm。已知足球与头部的作用时间为0.1s,足球的质量为0.5kg,不计空气阻力,足球可视为质点,重力加速度g取10m/s2。则颠球过程中,头部对足球的平均作用力为( )

A . 5N
B . 10N
C . 35N
D . 40N
如图所示,两足够长的光滑平行金属导轨 、
、 水平固定,导轨间距为 , 垂直导轨的虚线
水平固定,导轨间距为 , 垂直导轨的虚线 两侧导轨所在空间区域存在着磁感应强度大小均为、方向相反的竖直匀强磁场,两长度均为、电阻均为、质量均为的金属导体棒甲、乙垂直导轨放在左右两侧,并与导轨保持良好接触,不计其他电阻。现将导体棒甲用外力控制使之固定不动,给导体棒乙一个瞬时冲量,使乙获得一个水平向右的初速度
两侧导轨所在空间区域存在着磁感应强度大小均为、方向相反的竖直匀强磁场,两长度均为、电阻均为、质量均为的金属导体棒甲、乙垂直导轨放在左右两侧,并与导轨保持良好接触,不计其他电阻。现将导体棒甲用外力控制使之固定不动,给导体棒乙一个瞬时冲量,使乙获得一个水平向右的初速度 , 求:
, 求:
、水平固定,导轨间距为 , 垂直导轨的虚线两侧导轨所在空间区域存在着磁感应强度大小均为、方向相反的竖直匀强磁场,两长度均为、电阻均为、质量均为的金属导体棒甲、乙垂直导轨放在左右两侧,并与导轨保持良好接触,不计其他电阻。现将导体棒甲用外力控制使之固定不动,给导体棒乙一个瞬时冲量,使乙获得一个水平向右的初速度 , 求:
-
(1) 导体棒乙获得初速度时的加速度大小;
-
(2) 导体棒乙滑行的最大距离;
-
(3) 若当导体棒乙速度减为
 时突然撤去对甲控制的外力,求从此时到最终稳定的过程中系统总动量的变化
时突然撤去对甲控制的外力,求从此时到最终稳定的过程中系统总动量的变化 ?
?
如图所示,弯折成90°角的两根足够长金属导轨平行竖直放置,形成左右两个斜导轨平面,左导轨平面与水平面成37°角,右导轨平面与水平面成53°角,两导轨间距 , 电阻不计。同种材料、粗细均匀的正方形金属框abcd边长也为L,a、d两点通过金属铰链与导轨连接。在外力作用下,使金属框abcd以ad边为转轴逆时针匀速转动,转动角速度
, 电阻不计。同种材料、粗细均匀的正方形金属框abcd边长也为L,a、d两点通过金属铰链与导轨连接。在外力作用下,使金属框abcd以ad边为转轴逆时针匀速转动,转动角速度 。
。 时刻,ab边、cd边分别与导轨
时刻,ab边、cd边分别与导轨 、
、 重合,此时水平放置的金属杆ef在
重合,此时水平放置的金属杆ef在 导轨上由静止释放。已知杆ef与导轨之间的动摩擦因数
导轨上由静止释放。已知杆ef与导轨之间的动摩擦因数 (最大静摩擦力等于滑动摩擦力)。金属框abcd各边电阻均为
(最大静摩擦力等于滑动摩擦力)。金属框abcd各边电阻均为 ;杆ef质量
;杆ef质量 , 电阻为 , 空间存在平行于导轨且斜向上的匀强磁场,磁感应强度
, 电阻为 , 空间存在平行于导轨且斜向上的匀强磁场,磁感应强度 , 不计ef、ad与导轨间的接触电阻。(
, 不计ef、ad与导轨间的接触电阻。( ,
,  )
)
, 电阻不计。同种材料、粗细均匀的正方形金属框abcd边长也为L,a、d两点通过金属铰链与导轨连接。在外力作用下,使金属框abcd以ad边为转轴逆时针匀速转动,转动角速度。时刻,ab边、cd边分别与导轨、重合,此时水平放置的金属杆ef在导轨上由静止释放。已知杆ef与导轨之间的动摩擦因数(最大静摩擦力等于滑动摩擦力)。金属框abcd各边电阻均为;杆ef质量 , 电阻为 , 空间存在平行于导轨且斜向上的匀强磁场,磁感应强度 , 不计ef、ad与导轨间的接触电阻。( , )
-
(1) 金属框abcd从时刻转至90°时,请比较
 点与
点与 点的电势高低,并求出
点的电势高低,并求出 边产生的电动势;
边产生的电动势;
-
(2) 金属框abcd从时刻转过180°的过程中,求金属框abcd产生的焦耳热;
-
(3) 金属框abcd从时刻转过90°时,求杆ef的瞬时速度大小。
如图所示,金属轮 和绝缘轮
和绝缘轮 , 可绕各自中心金属轴
, 可绕各自中心金属轴 和
和 转动,和平行且水平放置,金属轮由三根金属辐条和金属环组成,轮的辐条长为4r、电阻为R,连接辐条的金属环的电阻可以忽略,三根辐条互成120°角,在图中120°的扇形区域内存在平行于轴向里的匀强磁场,磁感应强度大小为B,绝缘轮半径的为2r,另一半径为r的绝缘圆盘
转动,和平行且水平放置,金属轮由三根金属辐条和金属环组成,轮的辐条长为4r、电阻为R,连接辐条的金属环的电阻可以忽略,三根辐条互成120°角,在图中120°的扇形区域内存在平行于轴向里的匀强磁场,磁感应强度大小为B,绝缘轮半径的为2r,另一半径为r的绝缘圆盘 与同轴且固连在一起。一轻细绳的一端固定在边缘上的某点,在上绕足够匝数后,悬挂一质量为m的重物P。当P下落时,通过细绳带动和绕轴转动。转动过程中,、保持接触,无相对滑动。轮的轴和金属环通过导线与两平行的足够长的金属导轨连接,导轨倾角为 , 其上放置一质量为m、电阻为R、长度为L的金属棒EF,棒与导轨间的动摩擦因数为
与同轴且固连在一起。一轻细绳的一端固定在边缘上的某点,在上绕足够匝数后,悬挂一质量为m的重物P。当P下落时,通过细绳带动和绕轴转动。转动过程中,、保持接触,无相对滑动。轮的轴和金属环通过导线与两平行的足够长的金属导轨连接,导轨倾角为 , 其上放置一质量为m、电阻为R、长度为L的金属棒EF,棒与导轨间的动摩擦因数为 , 轨道间存在沿斜面向下的匀强磁场,磁感应强度大小也为B,不计导线电阻。
, 轨道间存在沿斜面向下的匀强磁场,磁感应强度大小也为B,不计导线电阻。
和绝缘轮 , 可绕各自中心金属轴和转动,和平行且水平放置,金属轮由三根金属辐条和金属环组成,轮的辐条长为4r、电阻为R,连接辐条的金属环的电阻可以忽略,三根辐条互成120°角,在图中120°的扇形区域内存在平行于轴向里的匀强磁场,磁感应强度大小为B,绝缘轮半径的为2r,另一半径为r的绝缘圆盘与同轴且固连在一起。一轻细绳的一端固定在边缘上的某点,在上绕足够匝数后,悬挂一质量为m的重物P。当P下落时,通过细绳带动和绕轴转动。转动过程中,、保持接触,无相对滑动。轮的轴和金属环通过导线与两平行的足够长的金属导轨连接,导轨倾角为 , 其上放置一质量为m、电阻为R、长度为L的金属棒EF,棒与导轨间的动摩擦因数为 , 轨道间存在沿斜面向下的匀强磁场,磁感应强度大小也为B,不计导线电阻。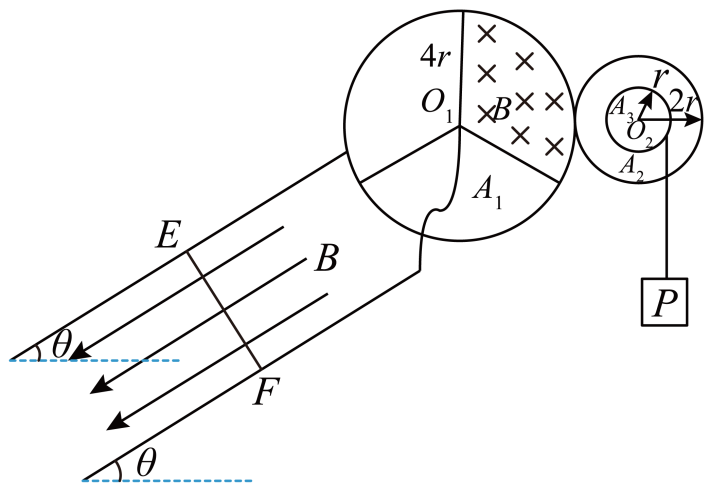
-
(1) 当P的速度为v时,求金属棒EF两端的电压;
-
(2) 金属棒EF刚好开始运动记为0时刻,经过时间t重物P下落高度为h,金属棒EF仍在轨道上运动,求此时金属棒EF的速度
 ;
;
-
(3) 为使金属棒EF不脱离轨道,轨道的倾角满足的条件。
在北京冬奥会期间,“送餐机器人”格外引人关注。已知机器人匀速运动时的最大速度 , 加速和减速阶段都做匀变速直线运动,加速度大小均为
, 加速和减速阶段都做匀变速直线运动,加速度大小均为 。若机器人为某楼层房间的运动员配送午餐,送餐过程餐盘和食物与机器人保持相对静止。
。若机器人为某楼层房间的运动员配送午餐,送餐过程餐盘和食物与机器人保持相对静止。
, 加速和减速阶段都做匀变速直线运动,加速度大小均为。若机器人为某楼层房间的运动员配送午餐,送餐过程餐盘和食物与机器人保持相对静止。
-
(1) 机器人由静止开始匀加速至最大速度的过程中,总质量
 的餐盘和食物受到的合外力冲量I的大小;
的餐盘和食物受到的合外力冲量I的大小;
-
(2) 机器人具有“防撞制动”功能,匀速直线运动的机器人从探测到正前方障碍物到开始制动的时间
 , 求探测到正前方的障碍物至停止运动,机器人前进的最大距离
, 求探测到正前方的障碍物至停止运动,机器人前进的最大距离 ;
;
-
(3) 机器人从一个房门静止出发沿直线到下一个房门停止运动,位移大小为4m,求该过程运动的最短时间。
最近更新



